
Параметр ISC — параметр выдвижения регулятора Х
Параметр ISC STEP.MTR — параметр выдвижения регулятора Х.Х.
Есть такой странный на первый взгляд параметр, который может вызвать вопросы у начинающего диагноста. Давайте разберемся для чего он и как с ним работать.
Разберем для начала аббревиатуру. ISC — Idle Speed Control, по-русски говоря — контроль холостого хода (оборотов холостого хода). Step.Mtr — измерение (подсчет) числа шагов, можно по простому назвать так. С этим разобрались. Едем дальше.
Этот параметр характеризует состояние штока регулятора Х.Х. (который представляет из себя шаговый мотор) относительно байпасного канала.

Нормальное состояние работы системы регулирования на прогретом моторе, как правило, характеризуется значениями ISC STEP.MTR в районе 20-30 шагов.
Чем больше шагов, тем больше отодвинут шток, тем больше воздуха система пытается впустить в двигатель для увеличения или поддержания оборотов Х.Х.
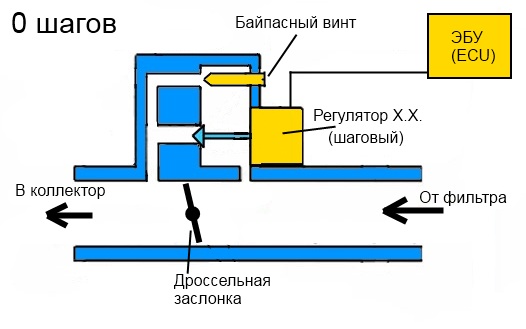
Чем меньше шагов, тем больше шток выдвигается и запирает байпасный канал. ISC STEP.MTR в 0 шагов говорит о том, что шток полностью перекрывает байпасный канал.
Теперь давайте разберемся как соотнести значения с конкретными проблемами.
Обращать внимание на этот параметр приходится когда холостые обороты начинают вести себя странно — плавать, просаживаться или подниматься.
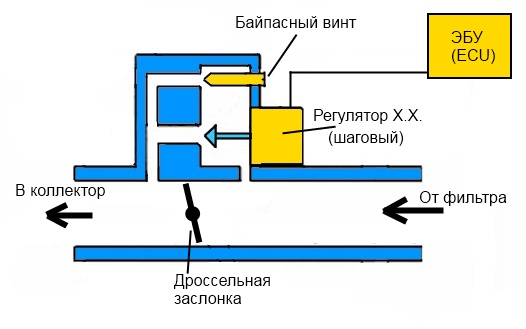
У дроссельной заслонки есть «пятак» — круглая шайба, которая призвана перекрывать поток воздуха во впуск через дроссель при не нажатой педали акселератора. Полностью просто так перекрыть поток воздуха нельзя, иначе двигатель заглохнет. Поэтому существует байпасный канал, который ведет воздух в обход дросселя и поддерживает работу двигателя.
Прохождение воздуха через байпасный канал регулируется байпасным винтом(у кого он есть) и штоком регулятора.
В результате засорения байпасного канала со стороны винта или со стороны штока прохождение воздуха затрудняется. В системах с байпасным винтом обычно регулятор вмешивается в работу только когда обороты падают так низко, что двигатель может заглохнуть, тогда количество шагов ISC STEP.MTR резко возрастает (шток втягивается открывая байпасный канал со своей стороны) в этот момент. В системах с винтом рабочее количество оборотов обычно выставляется именно винтом.
В системах без винта регулятор, естественно, полностью регулирует холостые. Там забитость байпасного канала очень характерно выражается увеличением числа шагов ISC STEP.MTR. Но его возможности не безграничны, особенно когда канал от нагара сужается, тогда регулятор в определенный момент уже не сможет контролировать холостые и машина может начать глохнуть на холостых.
Едем дальше. Нагар может обложить пятак дроссельной заслонки или ее вал так, что она не сможет до конца закрыться и будет постоянно пропускать воздух, тогда обороты будут наоборот выше, а параметр ISC STEP.MTR будет стремиться своим значением к 0. Также это может быть и в случае, когда пятак дросселя износился до такой степени, что при полностью закрытой заслонке существуют щели между корпусом и пятаком (см.фото ниже), через которые воздух протекает минуя байпасный канал. Отличить одно от другого, не снимая патрубки с дросселя можно соотнеся показания ISC STEP.MTR с показаниями датчика положения дроссельной заслонки TPS, тогда можно будет сказать приоткрыта заслонка или нет, сравнив показания TPS с номинальными. Иногда на сканерах еще есть индикация холостого хода — индикация да/нет — т.е. холостой ход или дроссель все-таки закрыт не до конца. Но это не всегда так очевидно, поэтому по возможности стоит все-таки стоит снять дроссель и осмотреть его, в том числе и сквозной просвет.

В любом случае надо понимать, что данный параметр не может дать абсолютной информации обо всем, он лишь может направить вас в направлении определенного диагноза, который можно будет уже поставить изучив состояние дросселя и показание других датчиков.
Например у вас может быть дырка во впускном коллекторе — так бывает у машин, чьи коллекторы не алюминиевые, а просто крашенная железяка, которая прогнивает.
В этом случае у вас также будут завышенные холостые, но дроссель может быть при этом в порядке, а показания ISC STEP.MTR при этом будут стремиться к 0. Тогда нужно будет руководствоваться дополнительно показаниями лямбды, которая, как правило, будет указывать вам на обедненную смесь и свечи скорее всего будут с белым налетом, да и параметр топливной коррекции Fuel Trim будет в зоне положительных значений.
А может быть и так, что обороты Х.Х. низкие т.к. у вас льют форсунки по причине своей засранности и тогда показания ISC STEP.MTR будут выше номинала и если сопоставить эти значения с состоянием свечей и показаниями лямбда-зонда, то можно будет уточнить этот диагноз.
В случае, если с машиной что-то кардинально не так, что это даже станет заметно ЭБУ и он поймет, что регулятор Х.Х. не может справиться с поддержанием оборотов в зоне необходимых значений система скорей всего выбросит ошибку P0505 — Idle Control System Malfunction.
Шаг двигателя регулятора холостого хода
А. ОЛЬШАНСКИЙ, г. Урюпинск Волгоградской обл.
Многие водители знают, что регулятор холостого хода современных двигателей АВТОВАЗа, а также ряда иномарок (Дэу Нексия, ЗАЗ Сенс, некоторых моделей Опель) требует повышенного внимания. В процессе эксплуатации его шток из-за отложений нагара и грязи теряет подвижность. В результате регулятор неадекватно реагирует на команды контроллера системы управления двигателем, что приводит к неудовлетворительной работе двигателя на холостом ходу и в переходных режимах. Ниже описан простой прибор, позволяющий оперативно проверять работоспособность регулятора холостого хода без подключения сканера к диагностическому разъему автомобиля, до монтажа на автомобиль, что стало сейчас актуальным из-за обилия контрафактных запасных узлов.
егулятор холостого хода входит в со-V став топливной системы автомобиля и предназначен для обеспечения устойчивой работы двигателя на холостых оборотах коленчатого вала. Сигналы, необходимые для работы регулятора, формирует электронный блок управления двигателем.
Напряжение на выводах обмоток
Регулятор представляет собой шаговый электродвигатель с двумя статор-ными обмотками. В роторе просверлено соосно отверстие и нарезана резьба, в которую одним концом ввинчен шток. Другой конец штока закреплен подвижно в продольных направляющих, удерживающих его от вращения вокруг своей оси. При вращении ротора шток из него выдвигается или вдвигается внутрь в зависимости от направления вращения. Управляют шаговым двигателем подачей импульсов напряжения одновременно на обе статорные обмотки. Для проверки работоспособности регулятора до его монтажа на автомобиль я изготовил простой пробник-испытатель, вырабатывающий требуемую импульсную последовательность.
При проектировании пробника была поставлена задача сделать его как можно проще, используя дешевые и распространенные детали. Пробник позволяет перемещать шток регулятора с двумя скоростями — около 100 шагов в секунду (для визуальной проверки работоспособности узла) и около 3 шагов в секунду (для проверки точности позиционирования штока в процессе диагностики двигателя). Питается пробник от бортовой сети автомобиля или стабилизированного сетевого блока с выходным напряжением 11. 15 В. Потребляемый ток — 0,3 А.
Наглядно проследить чередование управляющих импульсов на обмотках
электродвигателя позволяет таблица. Здесь А и В — выводы первой обмотки, С и D — второй. Логично для такого алгоритма управления использовать сдвиговый регистр, что и было реализовано на основе микросхемы К555ИР11А.
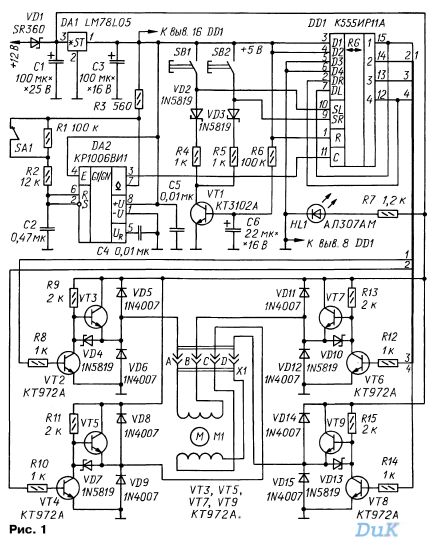
Схема пробника регулятора холостого хода представлена на рис. 1. Постоянное напряжение питания через диод VD1, служащий для защиты пробника от выхода из строя при случайном подключении в обратной полярности, поступает на выходной коммутатор тока на транзисторах VT2—VT9, на индикатор включения HL1R7 и стабилизатор DA1. Выходное напряжение 5 В стабилизатора питает таймер DA2 и сдвиговый регистр DD1.
Для правильной работы пробника необходимо, чтобы при включении питания на выходах 1 и 2 регистра присутствовало напряжение высокого уровня, а на выходах 3 и 4 — низкого, что соответствует шагу 1 в таблице. С появлением напряжения на выходе стабилизатора через резистор R6 начинает заряжаться конденсатор Сб. Время, в течение которого напряжение на базе транзистора VT1 меньше напряжения его открывания, — около 1 с. В течение этого времени на входах SR и SL сдвигового регистра присутствует напряжение высокого уровня.
При появлении на входе С регистра тактового импульса происходит параллельная загрузка информации в регистр с входов D1—D4 на выходы 1—4.
В процессе работы можно также установить регистр в режим параллельной загрузки одновременным нажатием на кнопки SB1 nSB2.
Как только конденсатор С6 зарядится и откроется транзистор VT1, входы SR и SL регистра через цепи VD2R4 и VD3R5 и открытый транзистор VT1 окажутся соединенными с общим проводом. Высокий уровень напряжения на этих входах сменится низким. Нажатие на кнопку SB1 и ее удержание приводит к сдвигу информации в регистре на один такт от выхода 4 к выходу 1 с каждым импульсом на тактовом входе С, а ротор шагового электродвигателя М1 поворачивается на один шаг. Шток регулятора при этом будет вдвигаться в корпус. Для того чтобы сдвиг информации происходил по циклу, выход 1 регистра соединен с его входом DL, а выход 4 — с входом DR. Нажатие на кнопку SB2 сдвигает информацию в противоположную сторону, шток выдвигается.
Генератор тактовых импульсов собран по типовой схеме на таймере DA2. При замкнутых контактах тумблера SA1 частота генератора — около 100 Гц, при разомкнутых — около 3 Гц. В режиме малой частоты генератора очень короткими нажатиями на кнопки можно перемещать шток на один-два шага.
Выходной коммутатор тока собран по мостовой схеме. Рассмотрим подробнее порядок управления обмоткой А—В электродвигателя М1. На базах транзисторов VT2 и VT6 в процессе работы всегда противоположные логические уровни. Допустим, что в некоторый начальный момент на базу транзистора VT2 через токоограничительный резистор R8 подано напряжение высокого уровня, значит, на базу транзистора VT6 через резистор R12 поступает напряжение низкого уровня. При этом транзистор /Т2 открыт, a VT3 закрыт, вывод А обмотки электродвигателя М1 через диод VD4 и транзистор VT2 соединен с общим проводом.

В то же время транзистор VT6 закрыт, и вывод В обмотки электродвигателя при этом соединен через открытый транзистор VT7 с плюсовым проводом питания (12 В). Через обмотку потечет ток, создавая условия для поворота ротора электродвигателя на один шаг. При инверсии сигналов на базах транзисторов VT2 и VT6 соответственно произойдет и инверсия уровня напряжения на выводах А и В обмотки. Диоды VD5, VD6, VD8, VD9, VD11, VD12 и VD14, VD15 защищают выходные транзисторы от всплесков тока самоиндукции обмоток электродвигателя. Обмотка С—D управляется аналогично.
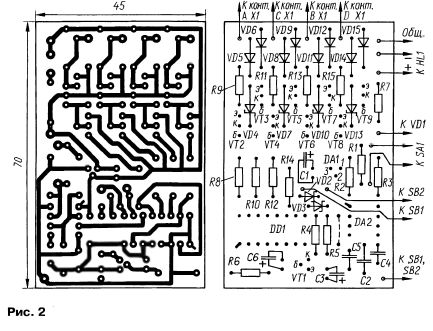
Все детали пробника, кроме диода VD1, тумблера SA1 и кнопок SB1 и SB2, смонтированы на печатной плате из фольгированного с одной стороны стеклотекстолита толщиной 1 мм. Чертеж платы представлен на рис. 2.
Вместо КР1006ВИ1 в пробнике можно использовать таймер NE555, вместо сдвигового регистра К555ИР11А — К531ИР11 или импортные аналоги, например SN74SL194. Диоды VD1 — VD4, VD7, VD10, VD13 —диоды Шотки. Транзисторы VT2—VT9 должны быть с возможно большим коэффициентом передачи тока, хорошо подходят для коммутатора тока составные транзисторы КТ972 с любым буквенным
индексом. Транзистор VT1 может быть любым маломощным структуры п-р-п.
Разъем Х1 для подключения регулятора к пробнику можно приобрести в магазине автозапчастей. Маркировка контактов разъема такая же, как указано на схеме. Однако следует знать, что у некоторых зарубежных автомобилей маркировка выводов обмоток и контактов разъема иная. Поэтому при покупке регулятора от иномарки надо омметром проверить его «цоколевку». К автомобильной батарее аккумуляторов пробник подключают с помощью зажимов «крокодил».
Плата установлена в пластмассовую коробку с внешними размерами 100x48x25 и фиксирована в ней термоклеем. Внешний вид собранного пробника, разъема и регулятора холостого хода показан на фото рис. 3.
При работе с демонтированным с двигателя автомобиля регулятором необходимо соблюдать осторожность: в крайнем выдвинутом положении шток выскакивает из корпуса, есть риск потерять детали. Если все-таки шток выпал, регулятор нужно аккуратно собрать, вставить шток в направляющие и вдвинуть на место с помощью пробника.
Пробник с пристыкованным к нему регулятором не следует оставлять включенным надолго, так как при этом через обмотки шагового двигателя постоянно протекает номинальный ток, что может привести к перегреванию обмоток и, как следствие, к выходу двигателя из строя.
Скорость перемещения штока 100 шагов в секунду соответствует рабочему режиму регулятора холостого хода, а три шага в секунду — удобна для диагностики и налаживания системы. Для проверки регулятора подключают его к пробнику и, нажимая на кнопки SB1 и SB2, несколько раз вдвигают и выдвигают шток при обоих значениях скорости перемещения. Если шток движется с рывками и остановками, регулятор бракуют и заменяют новым.
Если шток перемещается равномерно, без заеданий, остается только проконтролировать достаточность развиваемого шаговым двигателем усилия с помощью динамометра (см. http:// electromeh.ru/production/Autovaz/). При некотором навыке усилие можно проверять, удерживая движущийся шток пальцем.
При реальной работе регулятора на исправном автомобильном двигателе пределы перемещения штока довольно узки — около десяти шагов. Но при пуске двигателя и на переходных режимах его работы перемещения штока значительны.
После проверки регулятора необходимо вдвинуть шток примерно на середину хода. При слишком выдвинутом штоке узел можно повредить при установке на место, а при излишне вдвинутом система управления двигателем автомобиля после монтажа регулятора будет дольше адаптироваться на оптимальные обороты коленчатого вала на холостом ходу.
Добавил: Павел (Admin) 
Автор: А. ОЛЬШАНСКИЙ (Радио №3 2011 г.)
Шаг двигателя регулятора холостого хода

В настоящее время значительными темпами развиваются перевозочные услуги [1, 2]. В соответствии с этим наблюдается существенный рост автомобильного транспорта. По некоторым данным ежегодное увеличение парка автомобилей составляет 3–5 %. Число отказов в автомобиле увеличивается пропорционально числу транспортных средств.
Актуальность темы. Современное информационное обеспечение диагностическим оборудованием базируется на принципах: чем большее число отказов в процессе эксплуатации возникает по данному узлу или системе автомобиля и трактора, тем большее информационное обеспечение диагностическим оборудованием сопровождает данный узел или систему. При этом затраты на разработку и исследование новых диагностических средств для диагностирования данного узла или системы также возрастают. Однако новые диагностические средства часто не позволяют с заданной достоверностью определять техническое состояние элементов систем двигателя.
Целью настоящей работы является повышение эффективности процесса диагностирования датчиков холостого хода автомобилей при формировании стрессовых тестовых воздействий.
В работе [2] представлены данные по числу неисправностей и отказов элементов систем двигателя: свечи – 19,7 %, датчик положения дроссельной заслонки – 17,8 %, датчик массового расхода воздуха – 14,7 %, регулятор холостого хода – 13,2 %, модуль зажигания – 9,4 %, датчик кислорода – 6,8 %, датчик температуры – 4,3 %, регулятор топливного давления – 3,1 %, топливный насос – 2,2 %, датчик детонации – 1,0 %, прочие – 8,7 %.
По данным Кузнецова Е.С., распределение отказов %, элементов системы управления работой бензиновых ДВС выглядит следующим образом: электрические цепи – окисление контактов и обрыв проводов – 35 %; электробензонасос – 22 %; регулятор холостого хода – 10 %; элементы системы зажигания – 9 %; форсунки – 8 %; датчик кислорода – 7 %; датчики и реле – 6 %; электронный блок управления – 3 %.
Регулятор холостого хода занимает 3–4 место по числу неисправностей.
Теоретические исследования
Рассмотрим укрупненную структурную схему взаимосвязи систем ДВС автотракторных средств (рис. 1).

Рис. 1. Укрупненная структурная схема взаимосвязи систем ДВС автотракторных средств: ДМРВ – датчик массового расхода воздуха; ДПДЗ – датчик положения дроссельной заслонки; РХХ – регулятор холостого хода; ДТемпВ – датчик температуры впускаемого воздуха; ДПРВ – датчик положения распределительного вала; λ-зонд – датчик кислорода; ДПКВ – датчик положения коленчатого вала; ДД – датчик детонации; ДДавлВ – датчик давления воздуха; ΔРФВ, ΔRФВ – падение давления на фильтре, мПа и сопротивление фильтра системы впуска; RВВ – сопротивление ДМРВ; %отк – процент открытия дроссельной заслонки; UДПВ – выходное напряжение датчика положения дроссельной заслонки, В; QРВ, RРВ – подача воздуха через регулятор холостого хода, м3/с и его сопротивление; tТВ – температура впускаемого воздуха, °С; ΨПРВ – угол поворота распределительного вала, град; QВВ – подача воздуха, м3/с; tВВ, ΨВВ – время и угол открытия впускного клапана; Uλ, Iλ – выходные напряжение, В и ток датчика кислорода, А; UДД – напряжение, генерируемое датчиком детонации, В; n – частота вращения коленчатого вала ДВС, мин–1; UДВ – выходное напряжение датчика давления подаваемого воздуха, В
На рис. 1 представлены: системы энергообеспечения, МСУД, впуска и их отдельные компоненты. Система впуска включает фильтр, ДМРВ, ДПДЗ, заслонку, РХХ, ДТемпВ, ДПРВ, впускные клапана. МСУД может управлять заслонкой – в зависимости от нагрузки ДВС и частоты вращения, РХХ – за счет обеспечения заданного количества шагов штока и варьирования количества воздуха, впускными клапанами – за счет автоматического изменения фаз газораспределительного механизма.
Из представленной на рис. 1 схемы видно, что система энергообеспечения является системообразующей для остальных систем: МСУД, впуска. Причем все больше периферийных систем и механизмов включается в общую систему энергообеспечения. Поясним структурные связи внутри схемы. Система впуска обеспечивает значения параметров подачи воздуха QВВ, времени tВВ и угла открытия впускного клапана ΨВВ. При этом МСУД корректирует эти параметры и адаптирует под изменяющиеся режимы и конкретные условия эксплуатации [1, 2, 3, 4, 5]. На выходе ДВС при работе перечисленных систем датчики фиксируют изменения выходного напряжения Uλ и тока датчика кислорода Iλ, напряжение, генерируемое датчиком детонации UДД, частоту вращения коленчатого вала ДВС, выходное напряжение датчика давления подаваемого воздуха UДВ. На основании этих выходных данных ДВС микропроцессорная система управления ДВС формирует воздействия в виде изменения коэффициента топливокоррекции, коэффициента избытка воздуха, угла опережения зажигания и др. При этом система энергообеспечения традиционно питает все электропотребители, но и в значительной степени задействована в процессе поддержания обмена информацией, управления элементами, внутреннего диагностирования практически всех систем, адаптацией работы систем к изменяющимся техническому состоянию систем и условиям эксплуатации [2, 5].
Таким образом, степень охвата управлением, коррекцией и адаптивностью данных систем очень высока и все более повышается. Поэтому процесс диагностирования элементов системы впуска связан как с МСУД, так и с системой энергоснабжения [1, 2].
Материалы и методы исследований
Для выявления неисправности РХХ в процессе запуска ДВС наблюдается степень выдвижения штока (количество шагов). А далее проверяется быстрота корректирующих действий РХХ и степень адаптивности под стресс-тест [2, 5, 6, 7, 8, 9].
Для проверки быстроты корректирующих действий РХХ предлагается выключить из работы два цилиндра одновременно и проверить время реакции до момента добавления числа шагов [2, 9]. Можно записать условие для времени реакции tp:
где to – время отключения цилиндров, с; tc – время коррекции числа шагов РХХ, с.
При этом частота вращения коленчатого вала ДВС на двух оставшихся цилиндрах должна быть кратной частоте вращения холостого хода или на 10 % большей:
np = nxx + Δn10 %, (2)
где nxx – частота вращения холостого хода ДВС, мин–1; Δn10 % – максимальная прибавка частоты вращения коленчатого вала ДВС, мин–1.
Результаты исследований и их обсуждение
При проведении экспериментальных исследований фиксировались значения выходных данных процесса диагностирования РХХ двигателя в виде интерфейса экспериментальных данных (рис. 2).
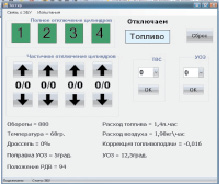
Рис. 2. Интерфейс экспериментальных данных при 4 работающих цилиндрах: Обороты – частота вращения коленчатого вала двигателя, мин–1; Температура – температура охлаждающей жидкости, °С; Дроссель – процент открытия дроссельной заслонки, %; Поправка УОЗ – поправка угла опережения зажигания, град; Положение РДВ – положение регулятора добавочного воздуха, шагов; Расход топлива – л/ч; Расход воздуха – кг/ч; Коррекция топливоподачи; УОЗ – угол опережения зажигания, град
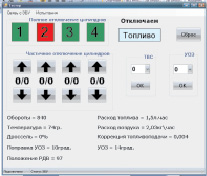
Далее фиксировался интерфейс экспериментальных данных при выключении одного, двух цилиндров (рис. 3, а, б).
Полученные в результате экспериментальных исследований данные были сведены в таблицу.
 а
а 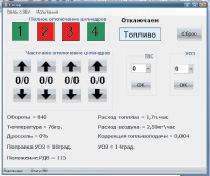 б
б
Рис. 3. Интерфейс экспериментальных данных: а – при одном выключенном из работы цилиндре; б – при двух выключенных из работы цилиндрах
Принцип действия регулятора (датчика) холостого хода
 Принцип действия регулятора холостого хода (РХХ) рассмотрим на примере РХХ (датчика холостого хода) ЭСУД автомобилей ВАЗ 21083, 21093, 21099, 21102, 2111.
Принцип действия регулятора холостого хода (РХХ) рассмотрим на примере РХХ (датчика холостого хода) ЭСУД автомобилей ВАЗ 21083, 21093, 21099, 21102, 2111.
Принцип действия регулятора холостого хода и порядок его работы на разных режимах
По сигналу контроллера (ЭБУ), на разных режимах работы двигателя, регулятор холостого хода перемещением наконечника штока изменяет величину проходного сечения байпасного канала, через который подается воздух под дроссельную заслонку. Предельно выдвинутое положение штока является исходным (нулевой шаг). Его можно наблюдать на не запущенном двигателе при выключенном зажигании. В этом положении сечение байпасного канала полностью перекрывается наконечником, и воздух под дроссельную заслонку не поступает. Полностью втянутый шток соответствует перемещению на 255 шагов и полностью открытому байпасному каналу.
— Работа РХХ при запуске двигателя
При запуске и прогреве двигателя, когда дроссельная заслонка полностью закрыта, контроллер, ориентируясь на показания датчика температуры, при помощи РХХ приоткрывает доступ необходимого количества воздуха для поддержания повышенных оборотов ХХ. По мере прогрева двигателя уменьшает количество поступающего воздуха – обороты снижаются до нормы.
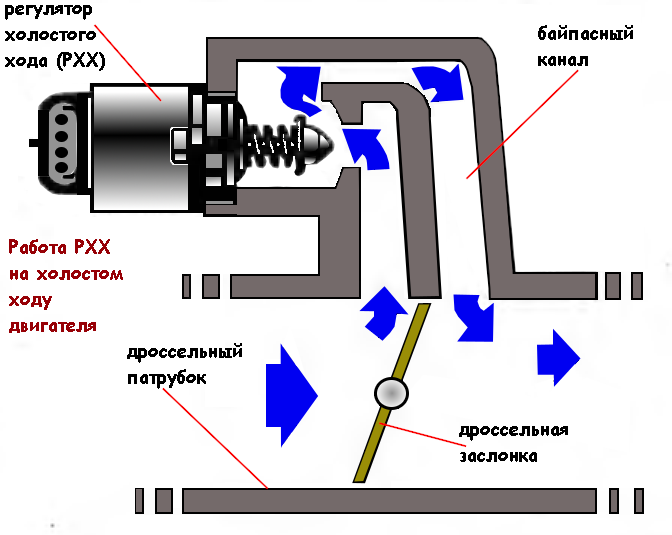
— Работа РХХ на холостом ходу
На прогретом двигателе, при закрытой дроссельной заслонке, контроллер при помощи РХХ обеспечивает необходимые обороты ХХ. Шток регулятора втянут, байпасный канал полностью открыт.
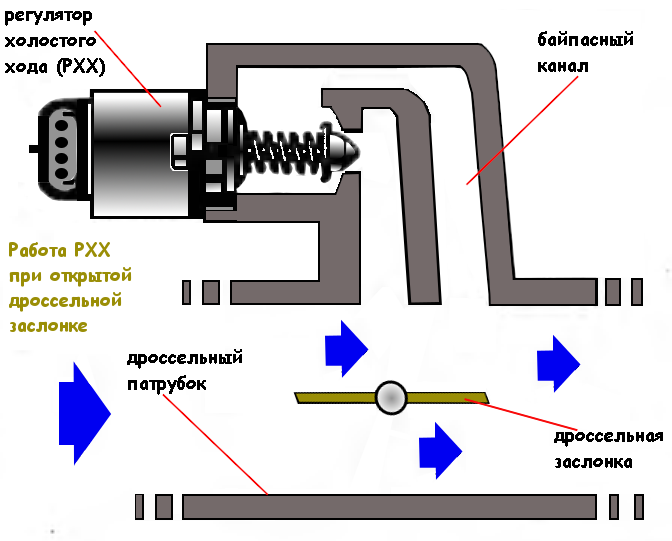
— Работа РХХ на режимах средних и полных нагрузок
При нажатии на педаль «газа» и открытии дроссельной заслонки воздух во впускной коллектор двигателя начинает поступать через сечение дроссельной заслонки, а РХХ устанавливается в такое положение, при котором при сбросе газа и резком закрытии дроссельной заслонки обеспечивалось бы плавное снижение оборотов двигателя до нормы. Для определения количества шагов РХХ в той или иной ситуации, контроллер использует показания датчика положения коленчатого вала (частота вращения коленчатого вала), датчика положения дроссельной заслонки (положение дроссельной заслонки в настоящий момент), датчика скорости (двигается автомобиль или стоит) и т. д.
 Работа РХХ на мощностных режимах
Работа РХХ на мощностных режимах
— Работа РХХ при увеличении нагрузки
При увеличении нагрузки (включение вентилятора системы охлаждения, компрессора кондиционера и т. д.) контроллер при помощи РХХ производит увеличение необходимого объема воздуха поступающего в двигатель для обеспечения его мощностных характеристик и предотвращения «провала» оборотов в режиме холостого хода.
Примечания и дополнения
— Регулятор холостого хода является элементом системы управления двигателем (ЭСУД). Это исполнительное устройство. С его помощью блок управления (ЭБУ) регулирует количество воздуха поступающего в цилиндры двигателя.

