Шаговой двигатель запуск схема
Шаговой двигатель запуск схема
Шаговые двигатели — это особый класс двигателей постоянного тока. Они кардинально отличаются от привычных коллекторных двигателей. Главное отличие шагового двигателя от двигателей других типов в том, что поворот его ротора осуществляется на некоторый, заданный конструкцией и схемой управления, строго определенный угол (шаг). Отсюда и главное преимущество шаговых двигателей — возможность точно позиционировать положение его ротора и удерживать его в этом положении без использования специальных муфт и тормозов (достаточно просто не снимать напряжение с обмоток). Еще одно важное достоинство двигателей этого типа в том, что максимальный момент ротора достигается на малых скоростях вращения. Это позволяет отказаться от сложных дорогостоящих редукторов, которые трудно изготавливать в радиолюбительских условиях. Эти два основных фактора делают шаговые двигатели незаменимыми при конструировании различных исполнительных механизмов, например, для управления манипуляторами в робототехнике, в станках (для подачи резца или фрезы) и т.п. Отсутствие коллектора делает шаговые двигатели практически вечными.
Как уже отмечалось, шаговые двигатели требуют особых, совершенно иных, чем для коллекторных или многофазных двигателей (с которыми их порой путают), схем управления. Этот факт является основным камнем преткновения особенно для начинающих радиолюбителей или радиолюбителей по той или иной причине не желающих или не имеющих возможностей использовать для этой цели микропроцессорные системы управления.
Однако насколько ли сложны такие схемы управления, всегда ли необходимо применения в схемах управления шаговыми двигателями дорогих специализированных микросхем или микропроцессоров?
Рассмотрим три базовые схемы управления шаговыми двигателями, которые помогут радиолюбителям в их освоении.
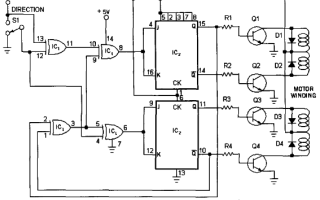
На рис. 1 показана простейшая схема управления для униполярных двигателей [1]. Такой двигатель имеет отвод от середины обмотки, что значительно упрощает схему драйвера.
Внимание! В первоисточнике [1] имеются ошибки в подключении IC1.
Схема не содержит дефицитных элементов, выполнена на двух ИМС 74-й серии (можно использовать и советские аналоги). Направление вращения двигателя определяется положением переключателя S1 (DIRECTION). Скорость вращения двигателя задается любым внешним генератором импульсов. Такой перестраиваемый по частоте генератор можно сделать, например, на ИМС таймера 555 (рис.2).


В качестве драйвера Q1-Q4 могут использоваться любые транзисторы с коэффициентом усиления по току не ниже 100 при заданном токе коммутации. Ток определяется сопротивлением обмоток двигателя по постоянному току и его напряжением питания (+12V на рис.1). Но лучше использовать в качестве драйвера подходящие MOSFET, например, IRF7470 (VDSS=40V, R тах=13mОм, lD=10A). Резисторы R1-R4 могут быть номиналом не ниже 470 Ом (в случае использования MOSFET эти резисторы необходимо оставить). В качестве диодов D1-D4, гасящих обратный импульс напряжения, можно использовать недорогие диоды 1 N4007. Две более сложные схемы управления маломощными униполярными и биполярными двигателями можно посмотреть в [2, 3]. Удобный к применению простой и недорогой вариант схемы управления биполярным двигателем с напряжением до 36 В и током до 0,6 А показан на рис.3 [4]. Схема пригодна и в качестве недорогой тестовой платы и обеспечивает работу двигателя в оптимальном пошаговом режиме с перекрытием фаз. Автор использовал схему для управления двигателем малой мощности 20M020D2B 12В/0.1А (каталог Distrelec 37-13-13).
Схема состоит из тактового генератора (IC3-1 и IC3-2), двунаправленного двухфазового формирователя на D-триггерах IC2 (SN74HC74D), схемы выбора направления вращения (IC3-3 и IC3-4) и драйвера IC1 L293DD (SGS-THOMSONMicroelec-tronics). Можно использовать и драйвер L293D (Texas Instruments Inc.). Микросхема драйвера имеет встроенные гасящие (кламперные) диоды и схему теплового отключения, устанавливать ее необходимо с обеспечением теплоотвода, который выполняется проводниками на печатной плате [5]. На схему подается напряжение питания в зависимости от типа двигателя. Питание формирователя осуществляется от стабилизатора напряжения, который должен обеспечить питание +5V на схему управления. В схеме использован недорогой линейный стабилизатор L7805ABD (корпус D2PAK), поскольку ток потребляемой формирователем не превышает нескольких миллиампер, а рабочее напряжение выбранного типа двигателя 12 В.

Включение шагового двигателя осуществляется кнопкой ВН1 или это может быть любой сигнал, например, отдатчика или схемы с открытым коллектором.
Цепь на транзисторе Q1 обеспечивает надежный запуск генератора. Такой принудительный пуск необходим, потому что генераторы, выполненные на основе двух (а не обычных трех) CMOS или TTL инверторов, иногда оказываются неустойчивы после включения (могут возбуждаться с частотой порядка 18 МГц). Команду на включение двигателя нужно подавать с некоторой задержкой после подачи питания. Рекомендуется давать задержку в несколько миллисекунд. Конденсатор С5 устраняет влияние «дребезга» контактов кнопки управления. Вращение ротора двигателя будет осуществляться в течение всего времени пока нажата кнопка или подан сигнала низкого уровня в точку «А». Во втором случае конденсатор С5 не нужен. Направление вращения зависит от положения выключателя S1. Вместо выключателя также могут быть также использованы любые подходящие сигналы, например, от концевого выключателя, выключателя остановки с таймером, пусковым механизмом или любыми цепями с открытым коллектором, подключенные в точку «В» вместо выключателя S1. Светодиод D1 — это индикатор подачи импульсов вращения «STEP». Он светится в режиме вращения двигателя. Скорость вращения двигателя зависит от его технических характеристик (от угла шага) и частоты тактового генератора. Временная диаграмма работы формирователя описываемой схемы управления показана на рис.4.

Если используются двигатели с четырьмя обмотками, то допустимо устанавливать ИМС драйвера L293 в параллель по цепям управления. Каждый драйвер управляет своей парой обмоток. В режиме удержания (режим, когда управляющие импульсы не подаются, но сам формирователь и драйвер не выключены) для уменьшения тока потребления и нагрева двигателя одну из ИМС можно выключать. Для этой цели используют входа EN (выводы 1,9, 11, 19) ИМС одного из драйверов. Такой вариант автором применялся для более мощных гибридных шаговых двигателей серии V9728 12В/0,6А (RS-каталог 440-458). Для двигателей с большим током, например, для гибридного двигателя серии DSH56 5В/1А (аналогичный по RS-каталогу 440-442), особенно если он используются в режиме форсированного начального тока, необходимо использовать драйверы с ограничением максимального тока. Для этих целей можно использовать, например, ИМС драйвера типа LMD18245 (ЗА, 55V) или аналогичный ему. ИМС драйвера типа LMD18245, в отличие от L293DD, является не четырех канальным, а двухканальным драйвером, поэтому для реализации схемы управления требуется две ИМС драйвера. Драйвер LMD18245 выполнен по DMOS технологии, содержит схемы защиты от перегрева, короткого замыкания и выполнен в удобном 15-выводном корпусе ТО-220, что позволяет легко отводить от его корпуса излишнее тепло.
Схема тестовой платы на основе драйвера LMD18245 показана на рис.5. В качестве задающего генератора использовалась схема генератора, приведенная ранее (рис.2), но с увеличенным до 4,7 кОм сопротивлением резистора R2. Для подачи одиночных импульсов используется кнопка ВН1 «Single STEPS», позволяющая сдвинуть ротор двигателя на один шаг. Направление вращения ротора определяется положением переключателя S1. Включение и выключение двигателя осуществляется выключателем S2. В положение «OFF» выключателя ротор двигателя освобождается и его вращение импульсами управления становится невозможным. Режим удержания «HOLD» уменьшает максимальный ток потребления обмотками двигателя с 2 А до 1 А. Если импульсы управления не подаются, то ротор двигателя остается в зафиксированном положении с пониженным вдвое током потребления.

Если же импульсы подаются, то вращение двигателя в этом режиме осуществляется с пониженным на малых скоростях моментом вращения. Необходимо заметить, что поскольку при полношаговом управлении с перекрытием фаз включены обе обмотки, то ток потребления двигателем удваивается, а схема драйвера должна рассчитываться исходя из требований обеспечения заданного тока двух обмоток (резистор R3, R8).
Схема содержит аналогичный, описанному ранее двунаправленный двухфазовый формирователь на D-триггерах ИМС D2 (SN74HC74D) и схему выбора направления вращения (D1 -4 и D1 -2). Максимальный ток драйвера задается резистором, включенным в цепь контакта 13 ИМС LMD18245 (резистор R3, R8) и двоичным кодом на контактах цепи управления тока (выводы 8, 7, 6, 4). Формула для расчета максимального тока приведена в спецификации на драйвер [6]. Ограничение тока осуществляется импульсным методом. При достижении максимально заданной величины тока осуществляется его «нарезка» («chopping»). Параметры этой «нарезки» задаются параллельной RC-цепочкой, подключенной к выводу 3 драйвера. Достоинством ИМС LMD18245 является то, что токозадающий резистор не включен непосредственно в цепь двигателя, имеет достаточно большой номинал и маленькую рассеиваемую мощность.
В заключение необходимо отметить, что шаговые двигатели могут устойчиво работать и на повышенных скоростях вращения, однако это требует уже применения особых схем, реализующих режим так называемого микрошагового управления. В этом режиме на каждый импульс тока ротор поворачивается не на заданный конструкцией двигателя угол (шаг), а на меньший дробный, как правило, равный 1/8, 1/16 или 1/32. Такой режим уменьшает и даже подавляет паразитный резонанс ротора, но требует сложных схем управления с применением микропроцессоров. Драйвер LMD18245 позволяет реализовать такой режим.
1. Noel McNamara. Simple circuit controls stepper motors // EDN. — 2004. — January 8.
2. UNIPOLAR Stepper Motor Driver (74194) : http://home.cogeco.ca/
3. BIPOLAR Stepper Motor Driver (74194) : http://home.cogeco.ca/
4. Rentyuk V. Control stepper motors in both directions// EDN. — 2010. — March 18.
5. L293, L293D QUADRUPLE HALF-H DRIVERS// Texas Instruments Inc. — 2002.
6. LMD18245 ЗА, 55V DMOS Full-Bridge Motor Driver // National Semiconductor Corporation.
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ-48. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. В этой статье вы найдете описание схемы работы шаговых двигателей, пример подключения к Arduino с помощью драйверов на базе ULN2003 и примеры скетчей с использованием стандартной библиотеки Stepper.
Шаговый двигатель – принцип работы
Шаговый двигатель – это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора. Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.


 Упрощенные анимированные схемы работы шагового двигателя
Упрощенные анимированные схемы работы шагового двигателя
Основные виды шаговых моторов:
- Двигатели с переменными магнитами (применяются довольно редко);
- Двигатели с постоянными магнитами;
- Гибридные двигатели (более сложные в изготовлении, стоят дороже, но являются самым распространенным видом шаговых двигателей).
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
- Увеличение крутящего момента на 40% по сравнению с униполярными двигателями;
- Возможность применения двигателей с любой конфигурацией фазной обмотки.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
 Драйвер двигателя L298N
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Подключение шагового двигателя к Ардуино
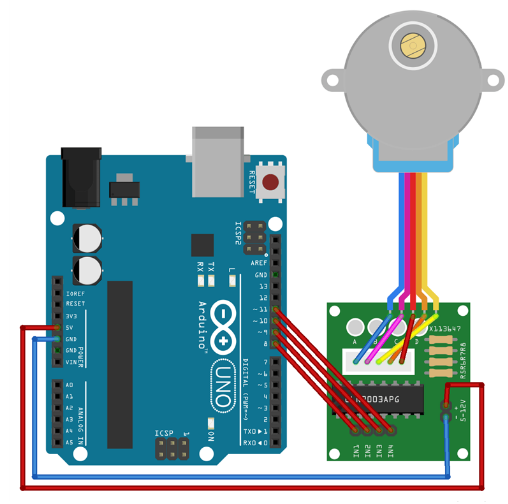
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:
 Подключение шагового двигателя к Ардуино на базе L298
Подключение шагового двигателя к Ардуино на базе L298
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.
 Принципиальная схема подключения шагового двигателя
Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.

Обзор основных моделей шаговых двигателей для ардуино
Nema 17 – биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия 170хHSхххА мотора является универсальной.

Основные характеристики двигателя:
- Угловой шаг 1,8°, то есть на 1 оборот приходится 200 шагов;
- Двигатель – двухфазный;
- Рабочие температуры от -20С до 85С;
- Номинальный ток 1,7А;
- Момент удержания 2,8 кг х см;
- Оснащен фланцем 42 мм для легкого и качественного монтажа;
- Высокий крутящий момент – 5,5 кг х см.
28BYJ-48 – униполярный шаговый двигатель. Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах.

- Номинальное питание – 5В;
- 4-х фазный двигатель, 5 проводов;
- Число шагов: 64;
- Угол шага 5,625°;
- Скорость вращения: 15 оборотов в секунду
- Крутящий момент 450 г/сантиметр;
- Сопротивление постоянного тока 50Ω ± 7% (25 ℃).
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
Пример скетча для управления
В наборе примеров библиотеки Stepper.h существует программа stepper_oneRevolution, в которой задаются все параметры для шагового двигателя – количество шагов, скорость, поворот.
Заключение
В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя. Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper. Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в своих проектах Arduino.
Контроллер для проверки шагового двигателя
Доброго здоровья всем. За последние годы у меня скопилась куча шаговых двигателей, да все руки до них не доходили, а ведь шаговик штука очень интересная и нужная. Да, еще в Интернете прочитал, что много нашего брата мучаются с запуском таких двигунов, вот и решил сделать контроллер для проверки наиболее часто встречающихся шаговых двигателей.
Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует очень много типов шаговых двигателей, но самыми простыми в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые (см. Рис.1)обмотки с выводами от середины. Их можно встретить в таких аппаратах, как принтер, копир, дисковод и т.д.
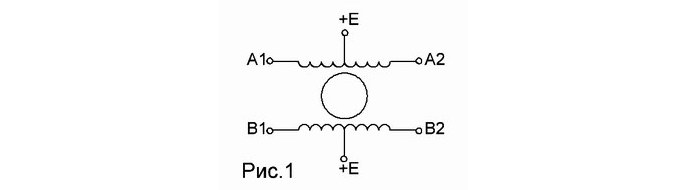
Схема управления шаговым двигателем.
Схема управления шаговым двигателем представлена на рисунке 2. 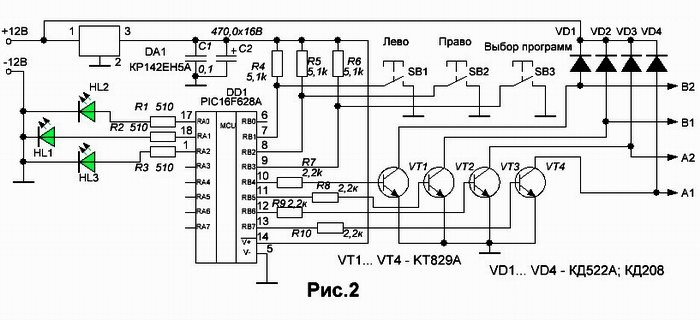
Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
Программы управления шаговыми двигателями
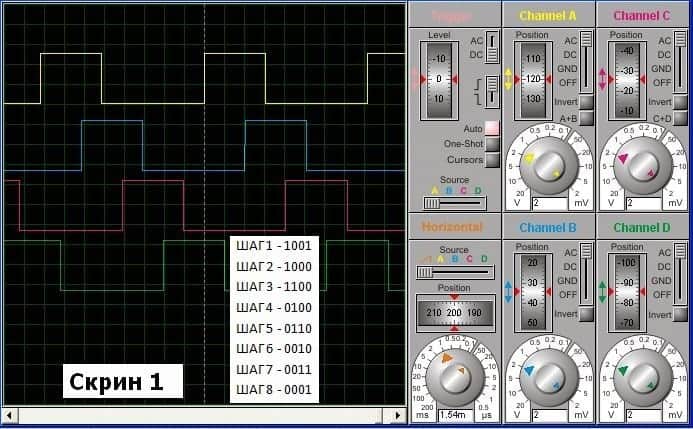
Программа управления состоит из пяти подпрограмм, которые переключаются кнопкой BS3 – «Выбор программ». Номер выбранной подпрограммы отображается тремя светодиодами в двоичной системе счисления. При первом включении должен засветиться светодиод HL1, индицирующий о том, что включена первая подпрограмма работы шагового двигателя в полушаговом режиме. Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя. Возможно, придется эксперементировать. На скриншоте 1 (передняя панель виртуального осциллографа программы Proteus) можно наблюдать импульсную последовательность и коды полушагов работы двигателя. Некоторые из шаговиков по этому алгоритму у меня не работали.
Полношаговый алгоритм работы шагового двигателя
Подпрограмма №2 – светится второй светодиод. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 2. 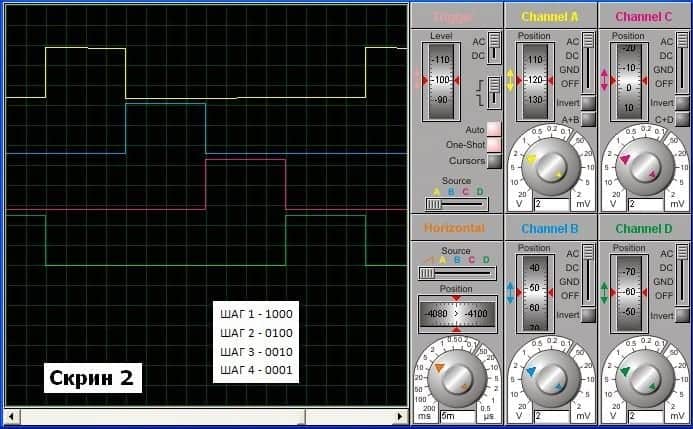
Подпрограмма №3 – светятся первый и второй светодиоды. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3. 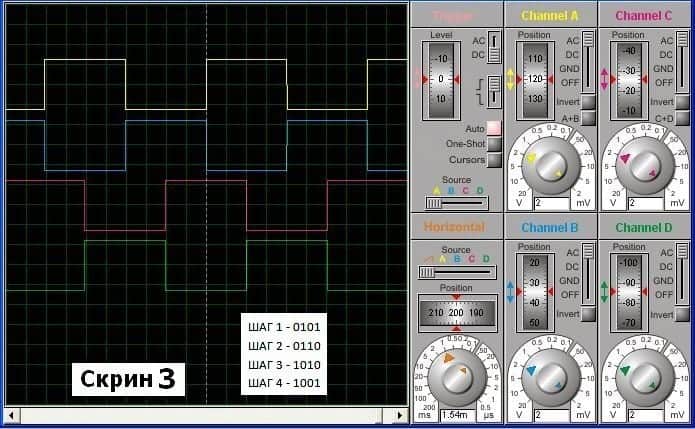
Количество шагов шагового двигателя.
Подпрограмма №4 – светится третий светодиод. Данная подпрограмма обеспечивает один шаг двигателя при каждом нажатии на кнопку «Право». Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Подпрограмма №5 – светятся первый и третий светодиоды. В этой подпрограмме творится тоже самое, только алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 3.
Общий вид платы — на фото. 
Файл прошивки, схему и рисунок печатной платы можно скачать здесь. Успехов всем. До свидания. К.В.Ю.
Управление шаговым двигателем NEMA 17 с помощью Arduino и драйвера A4988
Шаговые двигатели – это разновидность двигателей постоянного тока, в которых перемещение ротора происходит небольшими дискретными шагами. В настоящее время шаговые двигатели находят очень широкое применение – начиная от камер наблюдения и заканчивая сложными роботами и механизмами.

Чтобы лучше понять материал данной статьи целесообразно посмотреть статью об управлении шаговым двигателем 28-BYJ48 с помощью Arduino и потенциометра. Однако шаговый двигатель 28-BYJ48 имеет значительно меньший крутящий момент, чем более мощные двигатели такие как, например, NEMA 14, NEMA17.
В данной статье мы рассмотрим управление шаговым двигателем NEMA 17 с помощью платы Arduino и драйвера двигателя A4988. Для управления направлением вращения шагового двигателя мы будем использовать потенциометр. Ранее на нашем сайте мы также рассматривали управление шаговым двигателем NEMA 17 с помощью Arduino и драйвера DRV8825.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- Шаговый двигатель NEMA 17 (купить на AliExpress).
- A4988 Stepper Driver Module (модуль драйвера шагового двигателя) (купить на AliExpress).
- Конденсатор 47 мкФ (купить на AliExpress).
- Потенциометр (купить на AliExpress).
Шаговый двигатель NEMA17
Принцип действия шагового двигателя Nema17 аналогичен работе других шаговых двигателей. Более подробно о принципах работы шаговых двигателей можно прочитать в статье про подключение шагового двигателя к микроконтроллеру AVR.

Шаговый двигатель NEMA 17 имеет плиту размером 1.7 x 1.7 дюйма и он имеет больший крутящий момент по сравнению с другими аналогичными шаговыми двигателями меньшего размера, например, NEMA 14. Данный двигатель имеет 6 подводящих проводов и работает от напряжения 12 В. Он может работать и от напряжения меньшей величины, однако при этом соответствующим образом будет уменьшаться и его крутящий момент.
При каждом шаге ось двигателя NEMA17 поворачивается на угол, равный 1.8 градуса. Схема расположения подводящих проводов двигателя NEMA17 представлена на следующем рисунке.

Как вы можете видеть из представленного рисунка, шаговый двигатель NEMA17 имеет униполярное расположение 6 проводов. Эти провода подсоединены к двум раздельным обмоткам. Черный, желтый и зеленый провода подключены к первой обмотке, а красный, белый, и синий провода – к другой обмотке. В обычном режиме центральные провода обмоток (черный и белый) оставляют неподключенными.
Число шагов за оборот для двигателя NEMA17
Число шагов за полный оборот (Steps per Revolution) для каждого определенного шагового двигателя рассчитывается с помощью угла, на который поворачивается шаговый двигатель за один шаг (step angle). Для двигателя NEMA17 этот шаг равен 1.8 градуса, соответственно, получаем:
Steps per Revolution = 360/ step angle
360/1.8 = 200 Steps Per Revolution
Технические характеристики двигателя Nema 17
- рабочее напряжение: 12V DC (12 В постоянного тока);
- угол за один шаг (Step Angle): 1.8 градуса;
- 200 шагов за один полный оборот;
- число фаз: 4;
- длина двигателя: 1.54 дюйма;
- диапазон рабочих температур: от -10 до 40 °C;
- удерживающий крутящий момент: 22.2 oz-in.
Также на нашем сайте вы можете посмотреть все проекты, в которых были использованы шаговые двигатели.
Модуль драйвера шагового двигателя A4988
Модуль драйвера шагового двигателя управляет работой шагового двигателя, подавая на него различные фазы питания в необходимые моменты времени.
Модуль драйвера шагового двигателя A4988 предназначен для управления работой шагового двигателя Nema 17 и другими аналогичными биполярными (двухполюсными) шаговыми двигателями. Этот модуль имеет встроенный транслятор (преобразователь), что позволяет ему управлять и скоростью, и направлением вращения шаговых двигателей, используя для этого небольшое число контактов.

Для управления шаговым двигателем Nema 17 нам понадобится всего два контакта модуля A4988 – STEP (для управления шагами) и DIRECTION (для управления направлением вращения двигателя).
Драйвер двигателя A4988 может управлять работой шагового двигателя в 5 различных режимах: полного шага, половины шага, четверти шага, 1/8 шага и 1/16 шага. Вы можете выбрать необходимый вам режим шага используя контакты выбора режима (MS1, MS2 и MS3). На следующем рисунке представлена таблица задействования этих контактов для выбора необходимого режима шага.

Технические характеристики драйвера двигателя A4988:
- максимальное рабочее напряжение: 35V;
- минимальное рабочее напряжение: 8V;
- максимальный ток на одну фазу: 2A;
- режимы: полный шаг, ½ шага, ¼ шага, 1/8 шага и 1/16 шага;
- защита от обратного напряжения: нет;
- размеры: .5 × 20.5 mm (0.6″ × 0.8″).
Различия между драйверами двигателя DRV8825 и A4988
Оба этих драйвера двигателя предназначены для управления шаговым двигателем Nema 17, имеют похожую распиновку и области применения, но они отличаются в количестве микрошагов, рабочем напряжении и т.д. Ниже приведены следующие ключевые отличия этих модулей драйвера двигателя:
- модуль DRV8825 поддерживает 6 режимов шага, а модуль A4988 – только 5. Большее число этих режимов означает более равномерное и тихое функционирование шагового двигателя;
- минимальная длительность шага для DRV8825 составляет 1.9 мкс, а для A4988 – 1 мкс;
- без дополнительного охлаждения DRV8825 обеспечивает немного больший ток чем A4988;
- местоположение потенциометра, регулирующего лимит тока, в обоих модулях различно;
- DRV8825 может быть использован при более высоком напряжении питания;
- на контакте спящего режима (SLEEP pin) в DRV8825 по умолчанию не установлен режим с подтягивающим резистором как это сделано в A4988;
- вместо контакта напряжения питания DRV8825 имеет выходной контакт.
Схема проекта
Схема управления шаговым двигателем NEMA 17 с помощью Arduino и драйвера A4988 представлена на следующем рисунке.

Поскольку модуль драйвера A4988 имеет встроенный транслятор (преобразователь), поэтому к плате Arduino достаточно подсоединить только его контакты Step и Direction. Контакт Step используется для управления шагами двигателями, а контакт Direction – для управления направлением его вращения. Шаговый двигатель запитывается от источника питания 12V, а модуль A4988 – от платы Arduino. Потенциометр используется для управления направлением вращения двигателя.
Если вы будете поворачивать потенциометр по часовой стрелке, то и шаговый двигатель будет вращаться по часовой стрелке. Если вы будете поворачивать потенциометр против часовой стрелки, то и шаговый двигатель будет вращаться против часовой стрелки. Конденсатор 47 мкФ используется для защиты платы Arduino от выбросов напряжения. Контакты MS1, MS2 и MS3 остаются неподключенными, что означает что драйвер будет функционировать в режиме полного шага.
Внешний вид собранной конструкции проекта показан на следующем рисунке.

Таблица соединений платы Arduino, шагового двигателя Nema 17 и модуля драйвера двигателя A4988 выглядит следующим образом.
| Контакт A4988 | Соединение |
| VMOT | +ve Of Battery |
| GND | -ve of Battery |
| VDD | 5V of Arduino |
| GND | GND of Arduino |
| STP | Pin 3 of Arduino |
| DIR | Pin 2 of Arduino |
| 1A, 1B, 2A, 2B | шаговый двигатель |
Соблюдайте полярность источника питания.
Объяснение программы для Arduino
Полный код программы и видео с демонстрацией работы схемы приведены в конце статьи, здесь же мы кратко рассмотрим основные фрагменты кода.
Первым делом скачайте библиотеку для управления шаговым двигателем по следующей ссылке и добавьте ее в Arduino IDE. После этого подключите заголовочный файл этой библиотеки в программе и укажите число шагов для шагового двигателя NEMA 17 – оно равно 200.