
Применение шаговых двигателей
Применение шаговых двигателей

![]()
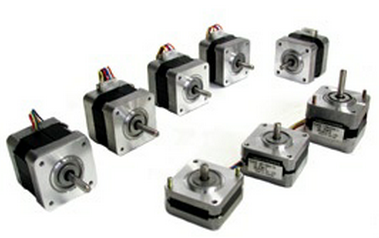
Использование шаговых двигателей в производстве
Шаговые электродвигателя представляют собой бесколлекторные синхронные импульсные двигатели. Поворот ротора на определенный угол и установка его в заданном положении осуществляется за счет поступающих в возбуждающую обмотку статора управляющих импульсов. В результате протекания импульсного потока через обмотку меняется ориентация магнитного поля между полюсами статора и создается механическое поворотное усилие. Необходимые угловые перемещения или шаги ротора производятся последовательной активацией обмоток статора. У шаговых двигателей купить отсутствует пусковая обмотка, т.к. используется частотный пуск, и для осуществления установки ротора в нужную позицию нет необходимости в датчике положения. Отсутствие коллектора повышает надежность и долговечность устройства.Приборы такого типа применяются в промышленности в качестве исполнительных устройств.
Установка
Шаговые двигатели устанавливаются в устройствах с дискретным управлением при необходимости точного позиционирования исполнительных механизмов. Их также используют в оборудовании с непрерывным перемещением и импульсным управлением, в котором характер движения задается программно, например, в станках с ЧПУ. Ротор может поворачиваться не только на заданный угол, но и на определенное число оборотов вокруг оси. Эта возможность позволяет использовать шаговые двигатели для позиционирования считывающих головок дисковых накопителей, проигрывателях оптических дисков, печатающих головок принтеров, сканеров и других бытовых и промышленных устройств и приборов.
Применение шаговых двигателей
Кроме промышленного и бытового секторов шаговые двигатели находят применение в творчестве радиолюбителей, изготовлении роботов, самодельных движущихся устройств, самодельных станков с ЧПУ и т.д. Купить шаговый двигатель для ЧПУ можно также через интернет. В двигателях используются постоянные магниты, электромагниты или оба вида магнитов в гибридных моделях. Последние чаще используются в промышленных станках различного назначения. Питаются двигатели от источника постоянного тока. Механические характеристики устройств зависят от частоты вращения вала и напряжения. При большой частоте момент на валу понижается. Такие устройства наиболее эффективны в низко динамических системах. Существуют разные способы управления шаговыми двигателями купить. Для управления используются специализированные контроллеры или сложные электронные схемы. Есть модели с управлением импульсными сигналами через порт компьютера.
К достоинствам шаговых двигателей относится доступность, позволяющая недорого купить шаговый двигатель для ЧПУ, при большой точности и стабильности угловых перемещений, простота установки, подключения и управления. Шаговые двигатели отличаются высокой безопасностью, надежностью и долговечностью. Для шагового двигателя не нужен редуктор, т.к. на низких оборотах угловой момент оказывается достаточным для любого применения. При выходе из строя устройство просто останавливается. Для определения текущего углового положения ротора не используется усложняющая схему обратная связь.
Возможные недостатки
Имеются и определенные недостатки, которые нужно учитывать перед тем как купить шаговый двигатель для ЧПУ. К ним относится невысокий коэффициент полезного действия и высокое удельное потребление энергии. По сравнению с электродвигателями других типов со сходными характеристиками они обладаю невысокой мощностью. Для исключения резонанса необходима специальная схема управления. Бывает повышенный нагрев и шум при работе. Устройства отличаются высокой инерционностью и низкой устойчивостью к перегрузкам. Угловой момент зависит от частоты вращения ротора. Отсутствует контур обратной связи, используемый для контроля точности позиционирования. Несмотря на недостатки, шаговые двигатели широко применяются в бытовых электронных приборах и промышленном оборудовании.
§ 3.5. Основные параметры и характеристики шаговых двигателей
Специфика конструкции ШД и многообразие режимов их работы вызывают необходимость оценивать эти двигатели по следующим параметрам: частоте собственных круговых колебаний; электромагнитным постоянным времени; коэффициенту внутреннего демпфирования и характеристикам – предельным механическим и предельным динамическим.
Частота собственных круговых колебаний– это угловая частота колебаний ротора около устойчивого положения при отсутствии момента нагрузки
 Она является обобщенным параметром, зависящим от момента инерции J, амплитуды максимального синхронизирующего момента Mmax, числа пар полюсов p.
Она является обобщенным параметром, зависящим от момента инерции J, амплитуды максимального синхронизирующего момента Mmax, числа пар полюсов p.
Период собственных круговых колебаний, равный 1/w, может служить внутренним эталоном времени. Действительно, момент инерции Jопределяет инерционность двигателя и механизма, амплитуда максимального синхронизирующего момента Mmaxдает характеристику ШД как преобразователю энергии, число пар полюсов p определяет степень электромеханической редукции угла поворота и скорости вращения. Отношение Mmax/Jдает теоретически предельное ускорение ротора шагового двигателя.
Электромагнитная постоянная времени обмоток управления Tэм = L/R характеризует скорость протекания электромагнитных переходных процессов. Часто для уменьшения Тэм последовательно с обмоткой управления включают добавочное сопротивление. Уменьшать постоянную времени необходимо потому, что чем она больше, тем до меньшего значения нарастает ток за время импульса напряжения, меньше становится синхронизирующий момент, а, следовательно, и допустимый момент сопротивления.
Коэффициент внутреннего демпфирования
о пределяется отношением амплитуды потокосцепления ротора с фазой обмотки статора к ее активному сопротивлению. Этот параметр относится только к ШД с активным ротором, поскольку его физический смысл заключается в образовании электромагнитного тормозного момента, вызванного взаимодействием поля ротора с током статора, наведенным этим полем и замыкающимся по цепи статор-источник тока. При этом механическая энергия колеблющегося ротора превращается в электрическую энергию с последующим рассеиванием ее в теплоту в активных сопротивлениях обмоток статора.
пределяется отношением амплитуды потокосцепления ротора с фазой обмотки статора к ее активному сопротивлению. Этот параметр относится только к ШД с активным ротором, поскольку его физический смысл заключается в образовании электромагнитного тормозного момента, вызванного взаимодействием поля ротора с током статора, наведенным этим полем и замыкающимся по цепи статор-источник тока. При этом механическая энергия колеблющегося ротора превращается в электрическую энергию с последующим рассеиванием ее в теплоту в активных сопротивлениях обмоток статора.
Предельная механическая характеристика– это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы (рис.3.7). С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю.

Рис. 3.7. Механическая характеристика ШД
Предельная динамическая характеристика– зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки. Такие характеристики называются предельными динамическими характеристиками пуска. Существуют также предельные динамические характеристики реверса и торможения.
Шаговые двигатели
Шаговый двигатель – это электромеханичес кое устройство, преобразующее сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. Современные шаговые двигатели являются, по сути, синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным, а частотным пуском шагового двигателя.
Основные параметры и характеристики шаговых двигателей
Специфика конструкции шаговых двигателей и многообразие режимов их работы вызывают необходимость оценивать эти двигатели по следующим параметрам: частоте собственных круговых колебаний; электромагнитным постоянным времени; коэффициенту внутреннего демпфирования и характеристикам – предельным механическим и предельным динамическим. Частота собственных круговых колебаний – это угловая частота колебаний ротора около устойчивого положения при отсутствии момента нагрузки. Она является обобщенным параметром, зависящим от момента инерции J, амплитуды максимального синхронизирующег о момента M max, числа пар полюсов p. Период собственных круговых колебаний, равный w0-1, может служить внутренним эталоном времени. Действительно, момент инерции J определяет инерционность двигателя и механизма, амплитуда максимального синхронизирующег о момента M max дает характеристику шагового двигателя как преобразователю энергии, число пар полюсов p определяет степень электромеханичес кой редукции угла поворота и скорости вращения.
Электромагнитная постоянная времени обмоток управления характеризует скорость протекания электромагнитных переходных процессов. Часто для уменьшения Т эм последовательно с обмоткой управления включают добавочное сопротивление. Уменьшать постоянную времени необходимо потому, что чем она больше, тем до меньшего значения нарастает ток за время импульса напряжения, меньше становится синхронизирующий момент, а, следовательно, и допустимый момент сопротивления.
Коэффициент внутреннего демпфирования определяется отношением амплитуды потокосцепления ротора с фазой обмотки статора к ее активному сопротивлению. Этот параметр относится только к шаговым двигателям с активным ротором, поскольку его физический смысл заключается в образовании электромагнитног о тормозного момента, вызванного взаимодействием поля ротора с током статора, наведенным этим полем и замыкающимся по цепи статор-источник тока. При этом механическая энергия колеблющегося ротора превращается в электрическую энергию с последующим рассеиванием ее в теплоту в активных сопротивлениях обмоток статора.
Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы. С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю. Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки.
Механическая характеристика шагового привода
Статический крутящий момент – момент удержания шагового двигателя (максимальный синхронизирующий момент). Статический режим работы – это режим, при котором по обмоткам статора протекает постоянный ток, создающий неподвижное в пространстве магнитное поле, а ротор не вращается.
Динамический крутящий момент – при задании высокой частоты отработки шагов крутящий момент падает, падение момента приводит к пропуску шагов и остановки двигателя.
Резонанс – явление резкого возрастания амплитуды вынужденных колебаний, которое наступает при приближении частоты внешнего воздействия к некоторым значениям (резонансным частотам), определяемым свойствами системы. Шаговый двигатель сильно подвержен резонансу.
В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий.
Резонанс шагового двигателя
Шаговые двигатели и особенности их применения
Шаговые двигатели — разновидность бесколлекторных двигателей. Их основные типы: с переменным магнитным сопротивлением, с постоянными магнитами, гибридные. Варианты исполнения обмоток двигателя. Режимы и способы управления им, особенности использования.
- посмотреть текст работы «Шаговые двигатели и особенности их применения»
- скачать работу «Шаговые двигатели и особенности их применения» (реферат)
Подобные документы
Двигатели с независимым и с параллельным возбуждением и с постоянными магнитами. Скоростные и механические характеристики. Свойство саморегулирования вращающего момента в соответствии с противодействующим моментом. Способы регулирования частоты вращения.
контрольная работа, добавлен 25.07.2013
Обоснование целесообразности использования энергосберегающих электроприводов с частотным регулированием. Методы оценок энергетических характеристик вентильных двигателей на постоянных магнитах. Расчет потребляемой мощности из сети асинхронного двигателя.
дипломная работа, добавлен 19.05.2019
Общая теория электрических ракетных двигателей. Особенности двигательных установок с малой тягой. Электрические ракетные двигатели и перспективные двигательные установки других типов. Ионный двигатель и его основные элементы. Контактные ионные источники.
курсовая работа, добавлен 01.02.2010
Промышленное применение электроэнергии. Совершенствование паровых двигателей и котельных установок. Новые тепловые двигатели. Паровые турбины. Двигатели внутреннего сгорания. Водяные турбины. Идея использования атомной энергии.
реферат, добавлен 03.04.2003
Расчет механических характеристик двигателей постоянного тока независимого и последовательного возбуждения. Ток якоря в номинальном режиме. Построения естественной и искусственной механической характеристики двигателя. Сопротивление обмоток в цепи якоря.
контрольная работа, добавлен 29.02.2012
Коэффициент полезного действия теплового двигателя. Основные элементы конструкции и функции газовой турбины. Поршневые двигатели внутреннего сгорания, их классификация. Два основных класса реактивных двигателей и характеризующие их технические параметры.
презентация, добавлен 24.10.2016
Тепловой двигатель как устройство, в котором внутренняя энергия преобразуется в механическую, история его появления. Типы двигателя внутреннего сгорания. Схемы работы двигателей. Экологические проблемы использования тепловых машин и пути их решения.
презентация, добавлен 25.03.2012
Назначение, устройство и принцип действия однофазного и трёхфазного трансформаторов, коэффициент трансформации, обозначение зажимов обмоток. Устройство и принцип работы асинхронного двигателя, соединение обмоток статора. Устройство магнитных пускателей.
шпаргалка, добавлен 23.10.2009
Изобретение первой паровой машины. Характеристика, строение, принципы работы двигателя внутреннего сгорания, двигателя Стирлинга, электродвигателя, пневмодвигателя, их классификации. Влияние выбросов двигателей на окружающую среду, загрязнение атмосферы.
презентация, добавлен 18.03.2011
Характерные особенности работы и конструкции бесконтактных двигателей постоянного тока типа БК-1, ДБ, которые предназначены для применения в составе научной и служебной аппаратуры космических аппаратов, других технических средств с высокой надежностью.
реферат, добавлен 28.02.2011
- 1
- 2
- 3
- 4
- »

