
Шаговые двигатели
Шаговые двигатели

Биполярные двигатели

Шаговые двигатели с энкодером

Актуаторы

Шаговые двигатели с редуктором
Электромотор, который преобразует посылаемые на обмотки статора импульсы электрического тока в дискретное вращение ротора и связанного с ним рабочего механизма, называется шаговым двигателем. Сегодня такие устройства широко используются во многих отраслях – от периферийной компьютерной техники (принтеров, сканеров, плоттеров) до промышленного оборудования с ЧПУ. Управление шаговыми электродвигателями осуществляется специальными электронными устройствами, которые запрограммированы на выполнение конкретных операций.
Виды шаговых двигателей, их преимущества
Основным отличием шаговых моторов от других электрических двигателей является дискретное вращение ротора (вала) на определенный угол при подаче импульса в обмотку статора. Это перемещение называется шагом, откуда и пошло название самого мотора.
В основу работы шагового двигателя положен принцип взаимодействия магнитных полей, предусматривающий взаимное притяжение разноименных полюсов. Сегодня можно купить шаговый двигатель трех видов, по способу реализации этого основополагающего принципа:
- мотор с переменным магнитным сопротивлением: конструкция ротора не предусматривает размещение в нем постоянных магнитов;
- двигатель с постоянными магнитами, входящими в конструкцию ротора, с числом совершаемых за один оборот шагов до 48 штук (соответствует углу поворота 7,5 о за один шаг)
- гибридный движок, обеспечивающий наибольшую точность позиционирования, момент вращения и скорость с шагом до 0,9 о (400 шагов за один оборот ротора).
Кроме того, по особенностям конструкции и наличию дополнительных устройств, можно разделить шаговые двигатели на следующие виды:
- биполярные, имеющие для каждой фазы только по одной обмотке, и униполярные моторы, в которых предусмотрен отвод от середины каждой обмотки, позволяющий менять полярность магнитного поля без применения сложных драйверов;
- движки с энкодером, позволяющие контролировать точность вращения;
- линейные двигатели (актуаторы) с редуктором и выдвижным штоком.
По сравнению с остальными видами электрических моторов, двигатель шаговый имеет ряд преимуществ, главные из которых:
- возможность задавать нужный угол поворота вала двигателя, подавая в обмотки статора определенное количество импульсов без участия сложных механизмов контроля и управления;
- высокая точность величины шага (3-5%) и скорости вращения без устройств обратной связи;
- быстрый старт, остановка и смена направления перемещения ротора;
- возможность при низких скоростях вращения присоединять нагрузку непосредственно к валу электромотора без редуктора;
- высокая надежность устройства, благодаря отсутствию коллекторных щеток, срок его эксплуатации ограничивает лишь долговечность подшипникового узла;
- возможность фиксировать положение ротора током удержания;
- более низкая цена шагового двигателя по сравнению с сервоприводом (в несколько раз).
Купить шаговый двигатель в Украине
При внедрении автоматизированных процессов на предприятиях различных отраслей сегодня не обойтись без шагового двигателя. Компания «Рефит» является крупнейшим в Украине поставщиком оборудования для средств автоматики и станков с числовым программным управлением. У нас вы можете купить шаговые двигатели для ЧПУ в Киеве, Днепре или Одессе от ведущих производителей этой продукции. Мы гарантируем нашим покупателям:
- помощь в подборе нужного оборудования;
- высокое оригинальное качество шаговых моторов;
- своевременную их поставку с предоставлением полного пакета документов, в соответствии с действующим законодательством;
- честные, доступные цены.
Если вы хотите купить шаговые двигатели в Украине выгодно, с гарантией их качества и надежности – звоните по указанным на сайте телефонам! Специалисты нашей компании помогут подобрать подходящие двигатели для потребностей вашего производства, а также другие узлы и комплектующие для станков с числовым программным управлением и систем автоматизации производственных процессов. Мы работаем по всей Украине, поставляя продукцию в любой регион страны.
Управление шаговым двигателем. Схема и описание
в Управление 0 3,769 Просмотров
Шаговые двигатели не сильно отличаются от многих классических двигателей. Для управления шаговым двигателем необходимо подавать постоянное напряжение на обмотки в точной последовательности. Благодаря этому принципу, можно обеспечить точный угол поворота оси.

Более того, оставив напряжение питания на одной или нескольких обмотках двигателя, мы переводим двигатель в режим удержания. Шаговые двигатели получили широкое распространение в технике, к примеру, их можно найти в гибких дисководах, сканерах и принтерах. Существует несколько типов шаговых двигателей.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей:
- Двигатель с постоянным магнитом
- Двигатель с переменным магнитным сопротивлением
- Гибридный двигатель
Шаговый двигатель с постоянными магнитами

Шаговый двигатель с постоянными магнитами применяется наиболее часто в устройствах бытового назначения, нежели в промышленных устройствах. Это недорогой двигатель, имеющий низкий крутящий момент и низкую скорость вращения. Он идеально подходит для устройств компьютерной периферии.
Производство шагового двигателя с постоянными магнитами несложно и экономически оправдано, когда дело касается производства больших объемов. Однако из-за его относительной инертности, применение ограничено в устройствах, где требуется точное позиционирование по времени.
Шаговый двигатель с переменным магнитным сопротивлением

В шаговом двигателе с переменным магнитным сопротивлением нет постоянного магнита, и как результат этого — ротор вращается свободно, без остаточного крутящего момента. Этот тип двигателя часто используется в малогабаритных устройствах, например, в системах микро-позиционирования. Они не чувствительны к полярности тока и требуют систему управления отличную от других типов двигателей.
Гибридный шаговый двигатель

Гибридный двигатель, на сегодняшний день, является самым популярным двигателем в промышленной сфере. Его название происходит от того, что он сочетает в себе принципы работы двух других типов двигателя (с постоянными магнитами и переменным магнитным сопротивлением). Большинство гибридных двигателей имеют две фазы.

Как работает гибридный двигатель
Работу гибридного шагового двигателя легко понять, глядя на очень простую модель, которая производит 12 шагов за один оборот.
Ротор этой машины состоит из двух частей, каждая из которых имеет три зуба. Между двумя частями находится постоянный магнит, намагниченный в направлении оси ротора, создавая, таким образом, южный полюс на одной части детали, и северного полюса на другой. Статор состоит из трубки, имеющей четыре зуба внутри нее. Обмотки статора намотаны вокруг каждого такого зуба.
Когда ток протекает через одну из обмоток, ротор занимает одно из положений, показанных на рисунках. Это связано с тем что, постоянный магнит ротора пытается минимизировать магнитное сопротивление обмотки. Крутящий момент, что стремится держать ротор в этих положениях, как правило, небольшой и называется «релаксация крутящего момента». Ниже изображена схема работы двигателя с 12 шагами.

Если ток течет по двум обмоткам статора, результирующие полюса будут притягивать зубы обратной полярности на каждом конце ротора. Есть три устойчивых позиций для ротора, столько же, сколько количество зубьев на роторе. Момент, необходимый для перемещения ротора от его стабильного положения во вращательное движение называется «удержание крутящего момента»
Изменяя ток первой до второй обмотки (В), магнитное поле статора поворачивается на 90 градусов и притягивает новую пару полюсов ротора. В результате этого ротор поворачивается на 30 градусов, что соответствует полному шагу. Возвращение к первому набору обмоток статора, но с питанием обратной полярности, изменяет магнитное поле статора еще на 90 градусов, и ротор поворачивается на 30 градусов (С).
Наконец, второй набор обмоток работает в противоположном направлении, обеспечивая третье положение ротора (еще 30 градусов). Теперь мы можем вернуться снова к первому этапу (А), и после прохождения заново всех этих четырех этапов, ротор будет перемещен еще на один зуб.
Очевидно, что если полярность питания обмоток будет противоположной описанной, то вращение двигателя так же сменится на противоположное.
Режим полшага
Подавая питание поочередно на одну обмотку, а затем на две, ротор будет совершать вращение на 15 градусов в каждом шаге и таким образом количество шагов на один оборот увеличится в два раза. Этот режим называется режимом «полшага», и большинство промышленных устройств применяют этот режим. Даже если это иногда вызывает небольшую потерю крутящего момента, режим в полшага намного плавнее на низких скоростях и вызывает меньший резонанс в конце каждого шага.
 Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.
Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.

Биполярные и униполярные шаговые двигатели
От того какая у шагового двигателя форма обмоток, двигатели делятся на униполярные и биполярные. У биполярного двигателя по 1 обмотке в каждой фазе. Всего две обмотки и соответственно 4 вывода (рис. а). Для обеспечения вращения вала на эти обмотки должно подаваться напряжение с изменяемой полярностью. Поэтому для биполярного двигателя необходим полумостовой либо мостовой драйвер, снабженный двухполярным питанием.

Униполярный двигатель также как и биполярный, для каждой фазы имеет по одной обмотке, но каждая обмотка содержит отвод от середины. В связи с этим, путем переключения половинок обмотки шагового двигателя, появляется возможность менять направление магнитного поля.
В данном случае значительно упрощается структура драйвера двигателя. Он должен обладать всего лишь четырьмя силовыми ключами. Соответственно, в униполярном двигателе применяется иной метод изменения направления магнитного поля. Отводы обмоток зачастую объединяются внутри двигателя, вследствие этого данный тип двигателя может обладать пятью или шестью проводами (рис. б).
Порой униполярные двигатели снабжаются четырьмя обмотками, каждая из которых содержит собственные выводы – то есть их всего восемь (рис. в). При определенном соединении этих обмоток подобный шаговый двигатель возможно использовать как биполярный либо униполярный. Кстати, униполярный двигатель, имеющий две обмотки с отводами по середине, возможно использовать и как биполярный. В этом случае провода, идущие от середины обмоток не используются.
Управление шаговым двигателем
В качестве примера управления шаговым двигателем возьмем униполярный шаговый двигатель ШД-1ЕМ, имеющий характеристики: количество шагов — 200/об., ток обмотки – 0,5А, мощность — 12 Ватт.
Драйвером, управляющим обмотками шагового двигателя выберем микросхему ULN2003A. Эта уникальная микросхема, не что иное, как транзисторная сборка по схеме Дарлингтона с открытым коллектором, снабженная диодом, защищающим цепь питания нагрузки. ULN2003A имеет семь каналов управления с током нагрузки 500мА каждый.
 Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
 Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем производится с помощью компьютера через LPT порт при помощи программы:
Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем производится с помощью компьютера через LPT порт при помощи программы:

 Скачать программу управления шаговым двигателем (204,1 KiB, скачано: 2 155)
Скачать программу управления шаговым двигателем (204,1 KiB, скачано: 2 155)
Шаговый двигатель виды. Шаговые двигатели: виды, принцип работы, система управления
от Admin
Продавцом предоставляются следующие гарантии:
1. Для легковых и внедорожных автомобилей BMW – гарантию на два года на весь автомобиль без ограничения по пробегу, согласно стандартам производителя Автомобиля BMW AG с момента первой регистрации Автомобиля;
Срок гарантии на дополнительное оборудование, которое не было произведено и/или установлено BMW AG, определяется согласно гарантийными условиями производителя и/или фирмы, выполняющей установку соответствующего оборудования;
· Смена владельца автомобиля не влияет на гарантийные обязательства Продавца в отношении Автомобиля, перейдите ремонт бмв.
Обзор шаговых двигателей или как подобрать шаговый двигатель
2. Гарантия недействительна, если:
· Продавец своевременно не сообщает о дефекте или не предоставляет возможность незамедлительно устранить дефект, о котором сообщил;
· Автомобиль был перегружен, неправильно эксплуатировался или использовался для участия в соревнованиях или ралли;
· Автомобиль видоизменен таким образом, который не принимается BMW AG;
· Продавцом не были приняты во внимание инструкции и правила по эксплуатации и обслуживанию Автомобиля.
3. Гарантия недействительна и расходы не покрываются в случае естественного износа Автомобиля, а также при замене комплектующих в случае их естественного износа (шины, свечи, стеклоочистители, тормозные колодки, диски, и т. д. ). Гарантией не покрываются расходы, связанные с периодическим обслуживанием Автомобиля, регулировкой и проверками, а также с затратами или ущербом, возникшим в результате простоя Автомобиля.
4. Гарантия становится недействительной по истечении срока, указанного в 1-м пункте.
*BMW AG сохраняет за собой право вносить изменения в некоторые пункты гарантийных условий. Более подробную информацию Вы можете получить у наших специалистов по вопросам гарантии.
Продавцом предоставляются следующие гарантии:
1. Для легковых и внедорожных автомобилей BMW – гарантию на два года на весь автомобиль без ограничения по пробегу, согласно стандартам производителя Автомобиля BMW AG с момента первой регистрации Автомобиля;
Срок гарантии на дополнительное оборудование, которое не было произведено и/или установлено BMW AG, определяется согласно гарантийными условиями производителя и/или фирмы, выполняющей установку соответствующего оборудования;
· Смена владельца автомобиля не влияет на гарантийные обязательства Продавца в отношении Автомобиля, на сайте ремонт бмв.
2. Гарантия недействительна, если:
· Продавец своевременно не сообщает о дефекте или не предоставляет возможность незамедлительно устранить дефект, о котором сообщил;
· Автомобиль был перегружен, неправильно эксплуатировался или использовался для участия в соревнованиях или ралли;
· Автомобиль видоизменен таким образом, который не принимается BMW AG;
· Продавцом не были приняты во внимание инструкции и правила по эксплуатации и обслуживанию Автомобиля.
3. Гарантия недействительна и расходы не покрываются в случае естественного износа Автомобиля, а также при замене комплектующих в случае их естественного износа (шины, свечи, стеклоочистители, тормозные колодки, диски, и т. д. ). Гарантией не покрываются расходы, связанные с периодическим обслуживанием Автомобиля, регулировкой и проверками, а также с затратами или ущербом, возникшим в результате простоя Автомобиля.
4. Гарантия становится недействительной по истечении срока, указанного в 1-м пункте.
*BMW AG сохраняет за собой право вносить изменения в некоторые пункты гарантийных условий. Более подробную информацию Вы можете получить у наших специалистов по вопросам гарантии.
Виды шаговых двигателей:
двигатели с переменным магнитным сопротивлением
двигатели с постоянными магнитами
биполярные и униполярные шаговые двигатели
Двигатели с переменным магнитным сопротивлением:
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала. Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имет шаг 30 град.

Двигатель с переменным магнитным сопротивлением.
При включени тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
Двигатели с постоянными магнитами:
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 1). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.

Рис. 1. Двигатель с постоянными магнитами.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).

Рис. 2. Разрез шагового двигателя с постоянными магнитами.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, котрая ограничивает максимальную скорость. Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением.
виды, принцип работы, система управления
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах. Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления (приборной панелью), передатчиками и сигнализаторами.
Как работает шаговый электродвигатель
Зная принцип работы шагового двигателя, вы сможете самостоятельно установить его или произвести ремонт. Он функционирует следующим образом:
После подачи напряжения на клеммы начинается непрерывное вращение специальных щеток. Входные импульсы устанавливают ведущий вал в положение, которое заранее определено.
Под воздействием импульсов вал перемещается под фиксированным углом.
Внешняя цепь управления, чаще всего представленная микроконтроллером, возбуждает электромагниты зубчатого типа. Один из них (тот, к которому приложена энергия) притягивает к себе зубья шестерни, вследствие чего вал движка делает поворот.
Будучи выровнены по отношению к ведущему электромагниту, остальные магниты смещаются по направлению к следующей магнитной детали.
Вращение шестеренки обеспечивается отключением первого электромагнита и включением следующего.
Шестеренка выравнивается по отношению к предыдущему колесу, после чего весь процесс повторяется столько раз, сколько необходимо.
Данные вращения являются постоянным шагом. Для определения скорости мотора нужно подсчитать количество шагов, требуемых для его полного оборота. Точность работы обеспечивается благодаря микропроцессорным системам управления шаговых двигателей.
Виды шаговых двигателей
Существует несколько разных моделей шаговых двигателей. Если конструкция устройства предусматривает наличие постоянного магнита, принцип работы основан на притяжении или отталкивании статором и ротором электромагнитного мотора. В переменно-шаговом движке ротор изготавливается из железа. Минимально допустимое отталкивание в нем происходит при наименьшем зазоре, что обеспечивает притяжение точек ротора к полюсам магнитного статора. В механизмах гибридного типа оба вышеприведенных принципа сочетаются и дополняют друг друга. Из-за сложности конструкции и изготовления такие приборы стоят дороже, чем остальные модели.
Чаще всего в быту и на производстве применяются двухфазные шаговые двигатели. В зависимости от типа обмотки электромагнитных катушек они подразделяются на:
Механизмы первого типа оснащены одной обмоткой. Каждая фаза определяется центральным магнитным краном. При включении определенной секции обмотки обеспечивается нужное направление магнитного поля. Такая конструкция предусматривает работу магнитного полюса без дополнительного переключения, что обеспечивает предельно простую коммутацию цепи, равно как и направления тока. Для работы движка (с учетом фазного переключения) обычно достаточно трех проводов на фазу и шести для выходного сигнала. Микроконтроллер используется для активирования транзистора в нужной последовательности (она определяется программой).
Для подключения обмоток соединительные провода должны прикасаться к постоянным магнитам двигателя. При соединении клемм катушки вал проворачивается с трудом. Поскольку общий провод длиннее, чем провод, соединяющий катушки, сопротивление между торцами проводов и торцами катушек в два раза больше сопротивления между торцом катушки и общим проводом.
В механизмах второго типа есть только одна фазовая обмотка. Управляющая схема такого движка обычно сложнее, так как ток в обмотку поступает при помощи магнитного полюса переломным образом. Два провода на фазу не являются общими.
Трехфазный шаговый двигатель устанавливается на фрезерных станках с ЧПУ, запускаемых с компьютера, и транспортных средствах, в которых используется дроссельная заслонка.
Подключение шагового двигателя
Выбор схемы подключения шагового двигателя зависит от:
количества проводов в приводе;
способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам. В первом случае используется один центр-кран каждой обмотки и один конец провода. Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу. Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
Номинальное напряжение производится первичной обмоткой при постоянном токе.
Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Благодаря высокой степени защиты шаговые двигатели успешно работают в тяжелых условиях.
Подключение шагового двигателя к микроконтроллеру AVR ATmega16

Шаговые двигатели – это бесщеточные двигатели постоянного тока, которую могут вращаться от 00 до 3600 дискретными шагами. С каждым управляющим сигналом ось такого двигателя поворачивается на фиксированное значение (шаг). Управление вращением подобных двигателей осуществляется последовательностью специальных сигналов. В отличие от серводвигателей шаговые двигатели могут управляться контактами ввода-вывода общего назначения, а не только контактами ШИМ модуляции, и могут вращаться на (+3600) и (-3600). Последовательность следования управляющих сигналов определяет будет ли шаговый двигатель вращаться по часовой или против часовой стрелки. Для управления скоростью вращения такого двигателя необходимо просто изменять уровень управляющих сигналов. У шаговых двигателей есть несколько режимов шагового (дискретного) вращения – на полный шаг, на половину шага и на микрошаг.
В этом проекте мы будем подключать шаговый двигатель 28BYJ-48 к микроконтроллеру ATmega16 (семейство AVR), используя программу Atmel Studio 7.0. Шаговый двигатель будет работать при напряжении питания 5В. Мы будем подключать шаговый двигатель к микроконтроллеру с помощью драйверов электродвигателей ULN2003 и L293 (по отдельности). Оба будут запитываться напряжением 5В.
Примеры шаговых двигателей
Как следует из их названия, вращение шаговых электродвигателей представляет собой серию коротких шагов. В этом и состоит их отличие от двигателей свободного вращения — шаговый двигатель сделает столько шагов, сколько ему будет задано, и вы будете точно знать, сколько он их сделал. Это одна из причин, почему шаговые двигатели широко применяются как в обычных, так и в ЗD-принтерах. В обычных принтерах они точно позиционируют бумагу, а в ЗD — рабочий столик и сопло.

На представленном рисунке представлены три образца шаговых электродвигателей. Миниатюрные электродвигатели типа тех, что показан слева, служат для перемещения элементов объектива в компактной фотокамере или смартфоне. В центре находится шаговый мотор-редуктор с питанием 5В — в его корпусе заключен и шаговый электродвигатель, и редуктор. Справа изображен шаговый электродвигатель, типичный дл я принтеров.
Принцип работы биполярного шагового электродвигателя
На следующем рисунке показана схема работы биполярного шагового электродвигателя. О другом типе шаговых электродвигателей — униполярных – можно прочитать в соответствующих источниках. В биполярном шаговом двигателе, как правило, имеются четыре катушки. Катушки, расположенные одна против другой, соединены так, что работают синхронно.
Все катушки расположены на неподвижном статоре двигателя, а значит, нет необходимости во вращающемся коллекторе и щетках, как у двигателей постоянного тока.
Ротор шагового электродвигателя выполнен в форме намагниченных зубцов с чередующимися северным (С) и южным (Ю) полюсами (зубцов на роторе обычно гораздо больше, чем показано на представленном рисунке). Каждую катушку можно подключить так, что она будет намагничена или как северный полюс, или как южный, — в зависимости от направления тока в катушке. Катушки 1 и 3 работают совместно так, что когда катушка 1 будет южным полюсом, катушка 3 также будет южным полюсом. То же самое относится и к катушкам 2 и 4.

Начнем с варианта рисунка под буквой «а» — когда катушка 1 , а значит, и катушка 3 запитаны так, что становятся южными полюсами (Ю), вследствие того, что разноименные полюса притягиваются, а одноименные отталкиваются, ротор поворачивается против часовой стрелки до тех пор, пока ближайшие зубцы ротора с намагниченностью северного полюса (С) не поравняются с катушками 1 и 3 (как показано на «б»).
Чтобы продолжить вращение против часовой стрелки, на следующем шаге (рисунок «в») необходимо подать ток в катушки 2 и 4 так, чтобы они стали северными полюсами (С). Тогда ближайшие зубцы ротора с намагниченностью Ю подтянутся к катушкам 2 и 4 (рисунок «г»).
Каждое такое действие проворачивает ротор электродвигателя на один шаг. Для продолжения вращения против часовой стрелки в катушке 1 снова нужно создать намагниченность С (см. представленную таблицу).
Таблица 1. Последовательность действий при вращении шагового двигателя против часовой стрелки
| Катушки 1 и 3 | Катушки 2 и 4 |
| Ю | — |
| — | С |
| С | — |
| — | Ю |
Прочерки в графах таблицы 1 указывают на то, что катушка в этот момент не оказывает влияния на вращение ротора и должна быть обесточена. Чтобы усилить момент вращения двигателя, на эти обесточенные катушки можно подать такой ток, чтобы полярность их намагниченности совпадала с полярностью стоящего под ней зубца ротора (таблица 2).
Таблица 2. Уточненная последовательность переключения катушек при вращении шагового двигателя
| Катушки 1 и 3 | Катушки 2 и 4 |
| Ю | С |
| С | С |
| С | Ю |
| Ю | Ю |
Для изменения направления вращения ротора нужно всего лишь изменить порядок переключения катушек, указанный в таблице 2, на обратный.
Необходимые компоненты
- Микроконтроллер ATmega16 (купить на AliExpress).
- Программатор AVR-ISP (купить на AliExpress), USBASP (купить на AliExpress) или другой подобный.
- Кварцевый генератор 16 МГц (купить на AliExpress).
- Шаговый двигатель 28BYJ-48 (купить на AliExpress).
- Драйвер двигателей ULN2003 (купить на AliExpress) или L293D (купить на AliExpress).
- Конденсатор 100 нФ (2 шт.) (купить на AliExpress).
- Конденсатор 22 пФ (2 шт.) (купить на AliExpress).
- Кнопка.
- Светодиод (купить на AliExpress).
- Макетная плата.
- Соединительные провода.
- Источник питания с напряжением 5 Вольт.
Маркировка контактов шагового двигателя
Представлена на следующем рисунке.

Как видим, схема контактов шагового двигателя как будто специально «заточена» под то, чтобы подключать его к соответствующим драйверам (ULN2003 или L293D).
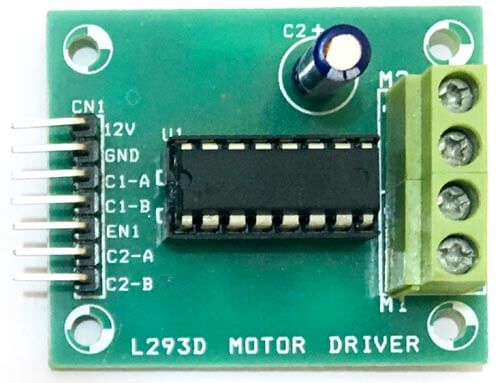
Назначение контактов микросхемы ULN2003 (драйвера двигателей) приведено на следующем рисунке.

Внешний вид этого драйвера двигателей выглядит следующим образом:

Внешний вид драйвера мотора L293D приведен на следующем рисунке:
Работа схемы
В следующих двух таблицах представлены схемы соединений входных и выходных контактов драйверов моторов ULN2003 или L293D с микроконтроллером AVR ATmega16 и шаговым электродвигателем.
| Atmega16 | ULN2003 | L293D |
| A0 | IN1(PIN1) | IN1(PIN2) |
| A1 | IN2(PIN2) | IN2(PIN7) |
| A2 | IN3(PIN3) | IN3(PIN10) |
| A3 | IN4(PIN4) | IN4(PIN15) |
| Шаговый двигатель | ULN2003 | L293D |
| Orange | OUT1(PIN16) | OUT1(PIN3) |
| Yellow | OUT2(PIN15) | OUT2(PIN6) |
| Pink | OUT3(PIN14) | OUT3(PIN11) |
| Blue | OUT4(PIN13) | OUT4(PIN14) |
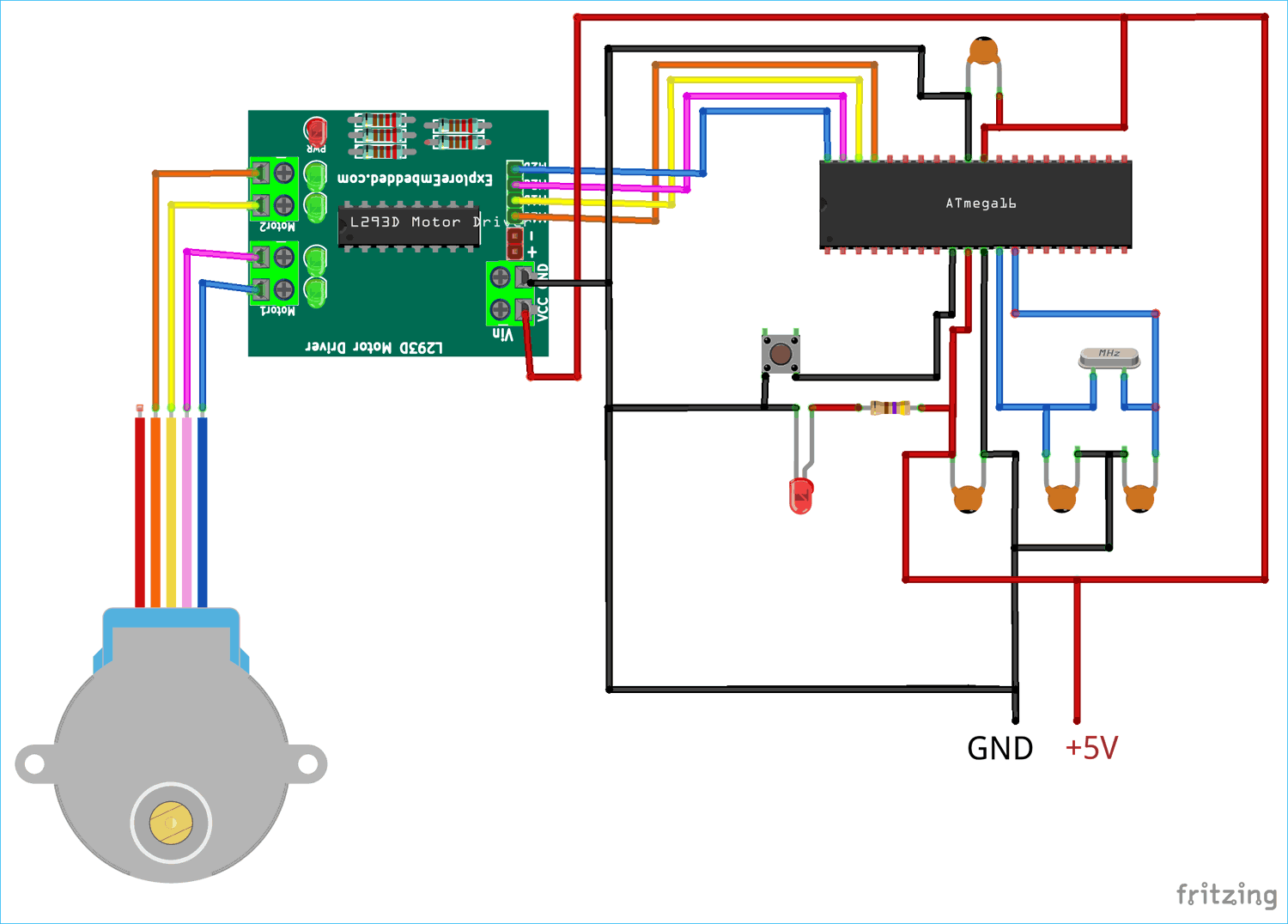
Схема устройства с драйвером мотора ULN2003 приведена на следующем рисунке.

Схема этой же самой конструкции, но с драйвером мотора L293D, будет выглядеть следующим образом.
Внешний вид устройства с использованием ULN2003 приведен в начале статьи, а с использованием L293D он будет выглядеть следующим образом:

Соедините все компоненты устройства в соответствии с приведенной схемой соединений (одной из двух). Для управления шаговым двигателем мы будем использовать PORTA микроконтроллера Atmega16. К контактам шагового двигателя нет необходимости подключать питание – для управления им нам понадобятся только контакты его катушек (coil pins) – верно для ULN2003, для L293D немного по другому. Очень важен порядок контактов для того чтобы шаговый двигатель работал корректно. Для микросхемы ULN2003 используются четыре ее входа и четыре ее выхода – входы соединяются с контактами PORTA микроконтроллера, а выходы – с сигнальными контактами шагового двигателя. Также подсоедините кнопку к контакту сброса (Reset pin) чтобы иметь возможность осуществлять сброс микроконтроллера Atmega16 всегда, когда нам это понадобится. Подсоедините к микроконтроллеру кварцевый генератор. Все устройство должно быть запитано напряжением 5В.
Исходный код программы на языке С (Си) с пояснениями
Приведенный в этом разделе код программы демонстрирует вращение шагового двигателя под управлением микроконтроллера AVR в обе стороны: по часовой стрелке и против часовой стрелки. Если вы хотите вращать шаговый двигатель только в одну сторону – просто закомментируйте ненужную часть кода.

