Зачем нам рампа для шагового двигателя
Зачем нам рампа для шагового двигателя?
Я новичок и пытаюсь понять, как я могу управлять шаговым двигателем. Концепция, которую я имел в виду, заключалась в том, что степперам нужны цифровые импульсы для запуска, и я тоже попробовал это. Я смог легко запустить степпер, который я использую. Но недавно я наткнулся на ссылку, где они использовали рампу для запуска степпера, оправдывая это тем, что
«Если мы пытаемся запустить шаговый двигатель быстрыми импульсами, то он просто сидит и гудит, не поворачиваясь. Нам нужно медленно запустить шаговый двигатель и постепенно увеличивать скорость шагов (нарастая)». Источник: http://www.societyofrobots.com/member_tutorials/book/export/html/314
Мой вопрос: почему тогда шаговый двигатель запускается с правильными квадратными импульсами? Зачем нам рампа? Все остальные форумы и учебные пособия всегда говорят о подаче цифровых импульсов в степпер для его запуска, почему там не обсуждается концепция генерации линейного изменения? Это плохая практика — запускать степпер с цифровыми импульсами?
Когда контроллер запускает двигатель, ротор должен двигаться достаточно далеко (под углом), чтобы при включении следующей катушки (или пары катушек) он вращал ротор в правильном направлении. Если ротор не сдвинулся на достаточный угол, то катушки будут тянуть ротор назад, а мотор просто сидит и гудит. В Интернете можно найти множество иллюстраций и анимаций, которые объясняют, как работает нормальный режим работы. Представьте, что ротор перемещался только на часть предполагаемого количества.
Ротор, вал и все, что связано с валом, имеют инерцию и различное трение.
Максимальная скорость, с которой шаговый двигатель может поворачивать вал, связана с крутящим моментом, доступным от двигателя, и крутящим моментом, необходимым для вращения вала (доступный крутящий момент падает при увеличении оборотов в минуту, а требуемый крутящий момент обычно увеличивается при увеличении оборотов в минуту). Это не имеет прямого отношения к инерции.
Чтобы на самом деле достичь максимума (или некоторой его доли), вы можете только так быстро ускорить обороты, не пропуская шагов. Максимальное ускорение связано с инерцией и избыточным доступным крутящим моментом при заданных оборотах. Если двигатель делает все возможное, чтобы не отставать от текущих оборотов, вы больше не можете ускоряться. Если число оборотов в минуту достаточно низкое, вам не нужно увеличивать его, вы можете просто сказать ему шаг, но это, как правило, составляет лишь часть оборотов, на которые способен двигатель. Часто для простоты используются линейные наклоны, но оптимальной будет более выпуклая кривая.
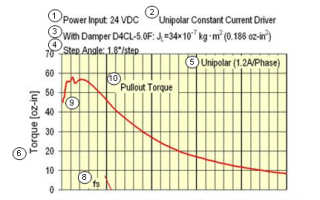
Вот кривая крутящего момента двигателя от Oriental Motor (крупного японского производителя):

Чтобы предсказать максимальную скорость ускорения, вам нужно знать момент и момент инерции массы . Если вы превысите максимальную скорость ускорения при данной нагрузке, то двигатель потеряет ступеньки, поэтому разумным является запас прочности.
Похоже, что прочитанное вами описание говорит о повышении скорости , другими словами, о частоте шагов. Импульсы для каждого шага все еще квадратные.
Причина в том, что шаговый двигатель может генерировать только такой крутящий момент. Когда мы превышаем этот максимальный крутящий момент, двигатель пропускает шаги.
Кроме того, ускорение двигателя требует крутящего момента по второму закону движения Ньютона : сила равна массе, умноженной на ускорение:
Для вращающейся системы термины немного меняются, но в основном они аналогичны: крутящий момент равен моменту инерции, умноженному на угловое ускорение:
Следствием этого является то, что для мгновенного ускорения двигателя потребуется бесконечный крутящий момент, что невозможно. Таким образом, мы должны ограничить ускорение, то есть «увеличить» скорость, чтобы ограничить крутящий момент, необходимый для чего-то, что двигатель может генерировать без пропусков шагов.
Два года спустя . Я хотел бы добавить некоторые детали о типичной скорости против вибрации / шума для любого шагового двигателя.
При очень медленном шаге, например, один раз в секунду, вал будет перемещаться в новое место и перегоняться, а затем многократно падать, пока не стабилизируется на этом шаге. Процесс повторяют на каждом новом шаге.
Электрическое напряжение / ток должны быть достаточными для нагрузки, а размер двигателя должен быть выбран в соответствии с требуемым крутящим моментом.
Когда двигателю не нужно двигаться, напряжение / ток можно уменьшить примерно на 50-75%, чтобы сохранить это положение. В случаях, когда трение является доминирующим, или при использовании какого-либо типа шестерни, двигатель может быть полностью обесточен. Это похоже на реле, которым необходимо, например, 12 вольт для активации, но затем легко поддерживать активированный контакт только 9 вольт.
При увеличении скорости примерно до 20 в секунду вибрация / шум достигают максимума. Это скорость, которую большинство инженеров постарается избежать.
При увеличении скорости вибрация / шум также уменьшаются благодаря крутящему моменту. Если вы построите график зависимости шума от частоты, форма покажет четкое направление вниз с некоторыми локальными максимумами, часто на частоте гармоники.
Предположим, что при типичном значении выше 100 шагов в секунду вибрация достаточно низкая, чтобы быть допустимой, и допустим, что крутящий момент становится слишком слабым для надежной работы выше 500 Гц.
Вы можете сразу запустить шаговый двигатель, используя любую из этих частот, не увеличивая скорость от 100 Гц до 500 Гц. Точно так же вы можете резко останавливать шаги независимо от частоты. Ток удержания достаточен для блокировки двигателя на этом этапе.
Рампинг необходим, когда вы хотите превысить максимальную частоту. Учитывая приведенное выше «типичное» число, вы можете обнаружить, что ваш двигатель при плавном ускорении все еще имеет достаточный крутящий момент для работы от 500 Гц до 700 Гц. Хитрость для надежной работы состоит в том, чтобы запустить рампу где-то около 400 Гц, а затем увеличить ее до 700 Гц. Держите его на такой скорости, пока не достигнете целевой позиции.
Затем плавно снизьте скорость с 700 Гц до 450 Гц. Если заданное положение все еще не достигнуто, держите двигатель на этой скорости. Затем с 450 Гц вы можете остановиться. Держите двигатель под напряжением при максимальном токе / напряжении в течение от 0,1 секунды до 1 секунды, чтобы убедиться, что все источники вибрации рассеиваются.
Линейную рампу проще создать. Но оптимальной является форма «S». Вы начинаете с безопасной частоты, сначала медленно повышаетесь и меняете скорость увеличения скорости экспоненциально до достижения максимума.
Когда наступает время замедления, применяется тот же алгоритм, медленно уменьшая скорость и экспоненциально изменяя скорость снижения скорости, останавливая уменьшение скорости при достижении безопасной скорости, что позволяет резко остановить двигатель.
Фактический код, выполняющий все это с использованием микроконтроллера Motorola 68HC05, занимал около 500 байтов (внутренняя СППЗУ составляла всего 8 КБ, а объем оперативной памяти составлял 128 байтов). Это было написано на ассемблере.
Если у вас есть оборудование для микроперехода, тогда вы можете игнорировать все упоминания о шуме и вибрации. Вам все еще нужно ускорение в форме буквы «S», если вы хотите превысить обычную максимальную скорость. Но поскольку нет вибрации, независимо от скорости, вы можете позволить замедлению идти так низко, как захотите.
Уроки, извлеченные из движения прямоугольной волны, все еще сохраняются. То есть для наиболее эффективного способа достижения цели вы хотите, чтобы замедление находилось на частоте чуть ниже точки, где крутящий момент двигателя достаточен для резкого останова и запуска.
Автор: alexxlab
Как подключить антенный кабель к антенне: Страница не найдена — Онлайн-журнал «Толковый электрик»
Кабель | оборудование антенное | Oehlbach OEHLBACH KABEL GMBH understands the importance of protecting the information we maintain. We are informing you about an incident that may have involved some personal information maintained on the servers of our parent company, VOXX International Corporation. This notice …
Проверить емкость конденсатора мультиметром: Как проверить конденсатор?
Как правильно проверить переменные конденсаторы. Сложно ли проверять «Конденсатор» на работоспособность? Как это сделать? Конденсатор – это важный элемент, обеспечивающий эффективную работу электронных схем по своему функциональному назначению. Прежде чем ознакомиться с методами, как проверить конденсатор мультиметром, рассмотрим виды этих деталей и принципы их работы. …
Регулятор для паяльника своими руками: Регулятор мощности для паяльника своими руками
Регулятор мощности для паяльника своими руками Данная инструкция рассказывает, как превратить ваш обычный паяльник в паяльник с регулятором температуры жала. При этом вы потратите не более 10 долларов. Паяльники с терморегулятором заводского изготовления стоят намного дороже 10 долларов. Будьте осторожны! Вам придется иметь дело с …
Защитное заземление определение: Упс. Вы не туда попали!
Защитное заземление — это… Что такое Защитное заземление?защитное заземление — Заземление точки или точек системы, или установки, или оборудования в целях электробезопасности. [ГОСТ Р МЭК 60050 195 2005] [ГОСТ Р МЭК 60050 826 2009] защитное заземление Заземление частей электроустановки с целью обеспечения… … Справочник …
Холодильник део не морозит нижняя камера: Не работает холодильник Дэу — Основные неисправности
Неисправности холодильников LG и их устранение _____________________________________________________________________________ _____________________________________________________________________________ Двухкамерный холодильник LG gr-389sqf No Frost слабо холодит, и морозилка тоже дует прохладным потоком воздуха. И там и там пробовал перезапускать, и по инструкции температуру выставил на 1 warm, но не помогает. Что делать?Если плохо работают обе …
Ремонт современных телевизоров: Ремонт телевизоров
Ремонт современного телевизора © Источник. https://service-isib.ru 11 Сен 2020, 14:48 Наверное у всех, когда-то ломался телевизор. Такая ситуация довольно неприятная, то к счастью исправимая. К вашим услугам качественный и недорогой ремонт ТВ в Иркутске в сервисном центре Исиб. Профессиональный ремонт ЖК, плазменных и ЛЕД телевизоров с …
Как правильно снять кондиционер: Как демонтировать кондиционер своими руками
Демонтаж кондиционера правильно, как правильно демонтировать кондиционер самостоятельно Как правильно демонтировать кондиционер. Не редко бывает ситуация, надо снять кондиционер, встаёт вопрос надо вызывать специалистов или можно кондиционер демонтировать самостоятельно? Суть демонтажа в том, что надо сохранить хладагент в системе, это удешевит установку кондиционера на новом …
Норма температуры в холодильнике и морозильной камере: Какая температура должна быть в холодильнике – быстрый ответ + инфографика
Какая температура должна быть в холодильнике и в морозильной камере: стандартыХолодильник позволяет продолжить жизнь продуктам питания, наслаждаться их вкусом и получить максимум полезных веществ. А зимой можно полакомиться словно вчера собранными ягодами или овощами.Однако, чтобы иметь такую возможность, нужно знать какая температура должна быть в …
Технологическое подключение к электрическим сетям: Понятие технологического присоединения и процедура его осуществления
ОАО «СКЭК». Потребителям. Технологическое присоединение к сетям электроснабжения. Общая информация. Технологическое присоединение – это процедура присоединения энергопринимающих устройств (энергетических установок) потребителя к электрическим сетям сетевой организации. Эта процедура необходима юридическим и физическим лицам, желающим обеспечить энергоснабжение вновь построенных объектов; объектов, уже подключенных к электрической сети, …
Греется однофазный двигатель с конденсатором
Когда двигатель следует считать горячим
Разумеется, при температуре корпуса +25°С ресурс двигателя будет больше, чем при +100°С. Однако для большинства электродвигателей +100°С является нормальной рабочей температурой. О температурной перегрузочной способности привода можно судить по двум характеристикам — классу изоляции и классу превышения температуры.
Температура корпуса или обмоток ниже +60°С не требует принятия каких-либо мер. Значение выше +70°С также не является критичным, однако в этом случае необходимо обратить внимание на двигатель — возможно, ему требуется дополнительная диагностика или техническое обслуживание.
При температуре выше +100°С нужно установить постоянный контроль за состоянием двигателя и принять меры по обнаружению причин нагрева. Если температура продолжает повышаться, двигатель нужно отключить от питания во избежание аварии и возгорания.
Как измерить температуру двигателя
Определить температуру двигателя можно несколькими способами.
- Рукой
. Самый простой способ, позволяющий быстро определить перегрев. Если при прикосновении к корпусу двигателя не возникает заметных болевых ощущений, можно с уверенностью сказать, что температура не превышает +60°С. - Термометром с внешним датчиком (контактным термометром)
. Этот способ требует времени и умения. Самые горячие места двигателя – посередине корпуса, где греется обмотка, а также передняя и задняя части корпуса, в районе подшипников вала. - Тепловизором
. Это наиболее быстрый и информативный способ измерения. Он позволяет увидеть всю картину нагрева сразу. - С помощью встроенных датчиков
. В некоторых моделях электродвигателей имеются встроенные датчики температуры (как правило, позисторы), которые выдают информацию о нагреве различных участков (обмоток, подшипников). Если такие датчики отсутствуют, их можно установить самостоятельно. Способ удобен тем, что контроль и реакцию на нагрев можно автоматизировать. Для этого сигнал от датчиков выводят на специальный вход преобразователя частоты, на специализированное реле температуры либо на аналоговый вход контроллера. В случае с контроллером можно написать программу со следующим алгоритмом: на первом пороге температуры выдается предупреждение оператору, на втором – двигатель отключается.
Причины перегрева электродвигателей
Причины перегрева двигателя могут быть механическими и электрическими.
Механические причины:
- Увеличение механической нагрузки на валу. Механическая перегрузка может быть вызвана заклиниванием механизмов, попаданием в них инородных предметов и т. д.
- Износ подшипника. Рано или поздно это приведет к его заклиниванию или разрушению. Важно диагностировать данную неисправность на ранней стадии, поскольку разрушение подшипников может привести к повреждению ротора, обмоток и корпуса двигателя.
- Механическое повреждение электродвигателя, например, нарушение соосности подшипников, которое вызовет их перегрев и трение ротора об статор.
- Недостаточное охлаждение корпуса. Как правило, охлаждение производится при помощи крыльчатки обдува, расположенной в задней части двигателя. Если крыльчатка сломана или зацепилась за решетку и проворачивается на валу, двигатель будет перегреваться. Другая причина уменьшения обдува – пониженные обороты двигателя при его питании через преобразователь частоты. В таком случае нужно применять независимый принудительный обдув.
Электрические причины:
- Перекос фаз и отклонение значения питающего напряжения. Асинхронные двигатели чувствительны к уровню питающего напряжения. Отклонение в 5% заметно увеличивает нагрев, при отклонении 10% эксплуатация двигателя ставится под вопрос.
- Пропадание фазы. Это крайний случай перекоса фаз, который возникает вследствие обрыва в питающей линии, пусковом устройстве либо внутри двигателя. Последствия — значительное понижение механического момента на валу вплоть до полной остановки двигателя.
- Нарушение схемы включения. Это относится, прежде всего, к схеме «Звезда» – «Треугольник». Причиной проблемы может быть неисправность схемы запуска либо ошибка электротехнического персонала.
- Замыкание в обмотке двигателя. Может быть межвитковым или между фазами. Определяется путем измерения тока по фазам во включенном состоянии либо с помощью омметра, когда двигатель выключен. При небольшом количестве замкнутых витков замыкание определить проблематично.








Итак, почему греется электродвигатель и как не допустить его перегрева?
Относиться к проблеме нагрева двигателя нужно с особым вниманием, ведь изоляция его обмотки имеет слабое сопротивление повышенным температурам. Зачастую нормой является температура, в пределах 90-95 ºС. Существуют электромоторы обмотка, в которых рассчитана на максимальную температуру в 130 ºС. Но в любом случае, во время эксплуатации могут возникать аварийные перегрузки или технологические неисправности, которые приводят к нагреву, являющемуся причиной выхода из строя изоляции. После чего зачастую происходит короткое замыкание. В результате, для восстановления работоспособности устройства, потребуется дорогостоящий ремонт двигателя или его полная замена. Менее затратным будет выяснить причину нагрева электромотора и устранить ее, нежели покупать новый двигатель или заказывать его перемотку.
Зачастую причиной перегрева двигателя является: — неисправность линий электропередач; — повышенные рабочие нагрузки; — износ щеток электромотора; — перекос вала; — плохая смазка и повышенный износ подшипников; — выход из строя или малоэффективная работа охлаждающего двигатель устройства (вентилятора).

Выяснить причину нагрева мотора можно, если включить его без нагрузки. Но предварительно необходимо изучить паспорт этого прибора, в котором отражена информация о максимальной нагрузке.
В том случае, если она больше фактической, нужно вначале снизить объемы выполняемых агрегатом работ. О неправильности технологического монтажа свидетельствует идеальная работа двигателя без нагрузки. Но если он без нагрузки греется, то причины кроются внутри этого агрегата.
Многие из них, устранить не составит труда, например, если причиной повышения температуры есть неработающий вентилятор охлаждения. Он может быть плохо смазан или забит пылью, и чтобы восстановить нормальный режим его работы требуется всего лишь смазать или очистить от пыли вентилятор. Независимо от того, что послужило причиной повышения температуры электромотора, эту неисправность необходимо устранить и как можно скорее. Так как дальнейшая эксплуатация двигателя может привести к более серьезным проблемам, его эксплуатационный ресурс снизится в несколько раз. Чаще всего проблема повышенной температуры электродвигателя решается путем смазки подшипника, стабилизации напряжения в электросети, которая питает тот или иной силовой агрегат, удаление грязи и пыли с поверхностей обмотки. В том случае если не получается произвести выравнивание напряжения в сети необходимо уменьшить нагрузку на мотор. При этом нормально функционировать он будет при напряжении, которое меньше номинального не более чем на 20 %. Устранение более сложных причин нагрева осуществляется путем чистки или замены щеток, перемотки двигателя.

Что делать, если обнаружен перегрев двигателя
Если двигатель греется во время работы, необходимо провести его диагностику. Для этого можно воспользоваться приведенным ниже пошаговым алгоритмом.
- Оцениваем температуру. Если температура критическая, нужно незамедлительно обесточить двигатель.
- Оцениваем наличие посторонних звуков при работе (треск, дребезг, скрежет). Если источник звука находится в механике привода (в нагрузке), необходимо остановить двигатель и провести ремонт неисправного узла. Если звук раздается из двигателя, скорее всего, потребуется заменить подшипники.
- Проверяем ток по фазам при помощи токовых клещей. При превышении тока можно говорить о перегрузке, при дисбалансе по фазам – о перекосе фаз, обрыве фазы или межфазном замыкании.
- Если подшипники предусматривают регулярную смазку, проверяем и, при необходимости, заменяем смазку.
- Отсоединяем нагрузку от вала двигателя, проверяем работу двигателя в холостом режиме.
- Проверяем работу воздушного охлаждения. При необходимости проводим чистку крыльчатки и поверхности двигателя.
- Проверяем защиту двигателя на соответствие номинальному току, который указан на шильдике.
Очень сильно греется однофазный электродвигатель
Ради интереса проверил только что на трансформаторе, обычный ОСМ1-0,16 220-5-220.
Замерил индуктивность секции 0-5-220 на клеммах «0» и «220», получил индуктивность — 2,4 Гн;
Замерил индуктивность секции 0-5-220 на клеммах «0» и «220», но замкнув между собой клеммы «0» и «5», создав таким образом искусственное межвитковое замыкание, получил индуктивность — 1 Гн.
Как видим — падение приличное, но не полное.
Учитывая тот факт, что двигатель двухфазный конденсаторный, то индуктивности обмоток должны быть примерно равными (хотя в принципе, судя по фото они не одинаковы, но отличие небольшое) следовательно, если будет большое расхождение в измеренных индуктивностях — межвитковое все таки присутствует.
Я бы озадачился покупкой необходимого на базаре.
От этого они, клещи, дешевле не станут, а шанс купить полный шлак сильно возрастет. Ну да ладно у меня в принципе есть мультиметр с возможностью замера тока до 20А — попробую им измерить общее потреблении движка. Всяко лучше чем ничего.
Вся прелесть специализированных приборов для проверки двигателей в том, что они делают это на высоком напряжении.
На то они и специализированные приборы, но будем пытаться как то так выкрутиться.
Метод 100 % и абсолютно бесплатный. Сначала нужно отсоединить обмотки ото всего, не забыв при этом о фазировке. Потом с мотора снимается статор и одна из обмоток, любая, подключается к сети через выключатель, можно через ЛАТР и снизить напряжение до 120 — 150 В, ниже снижать не стоит. Потом берется ножовочное полотно или любая другая тонкая стальная пластинка, например рулетка металлическая, но удобней полотно, включается питание и полотном водят внутри статора плашмя по железу, где прилипло полотно — там и короткие витки, не прилипло — повезло, процедура должна быть кратковременной чтобы статор не перегрелся, на номинальном напряжении нагревается быстро. И так каждая обмотка. Трехфазник можно сразу к трем фазам и вместо полотна шарик от подшипника внутрь запустить, бегает — нормально, прилип — плохо..
Спасибо за подробное разъяснение, единственный вопрос — а можно от 36 В провести проверку? Просто ссыктно включать обмотку напрямую в сеть учитывая то, что ротора нет.
P.S.: Измерил конденсатор — 24,8 мкФ. Эх а была надежда, что с конденсатором что-то не так. Хотя я измерил только емкость, может его под рабочим напряжением «пробивает» или еще какая беда происходит.
Защита от перегрева
При своевременном обнаружении перегрева двигателя можно легко устранить его последствия и не допустить еще больших неприятностей. Однако лучше постараться вовсе избежать этой проблемы.
В большинстве случаев перегрев приводит к повышению рабочего тока двигателя. Контроль за током обычно осуществляют при помощи автоматов защиты и тепловых реле. Многоуровневая защита также встроена в преобразователи частоты. При использовании реле защиты двигателя дополнительно можно контролировать уровень напряжения и чередование фаз.
Приведенные способы защиты лучше всего использовать совместно с датчиками температуры. Это позволит на 100% защититься от перегрева.
Другие полезные материалы:
5 шагов подключения неизвестного электродвигателя Как рассчитать потребляемую мощность двигателя Работа частотника с однофазным двигателем
Последствия перегрева ротора
Перегрев ротора может привести к различным последствиям для электродвигателя. Некоторые из них приведены ниже:
- Плавление поршня;
- Вылет клапанного гнезда;
- Протекание масла;
- Заклинивание двигателя.
Все эти последствия нелегко, а порой и невозможно устранить. Всё зависит от марки конкретного производителя электродвигателя, от степени тяжести неисправности, от условий эксплуатации оборудования и других факторов. Многие пользователи таких электродвигателей сразу впадают в панику. Это вполне объяснимо: зачастую вышедшие из строя электродвигатели не подлежат ремонту.
Чтобы избежать всех этих недоразумений, не портить нервы и не расстраиваться лишний раз, лучше всего приобретать изначально качественные агрегаты. К таким видам относятся, например, электродвигатели Siemens, Toshiba и другие. Они отличаются высоким качеством, длительным сроком эксплуатации и минимальным количеством неисправностей. Приобрести такие двигатели вы можете в нашем интернет-магазине «ЭНЕРГОПУСК».
Как не допустить перегрев?
Приобретая новый электродвигатель, желательно знать основные правила недопущения перегрева ротора электродвигателя. 5 АИР электродвигатели, АДМ, АИС и другие подобные модели способны прослужить вам долгое время при условии соблюдения этих простых правил.
- соблюдать необходимую температуру при эксплуатации электродвигателя;
- соблюдать необходимое давление в двигателе;
- соблюдать все правила эксплуатации двигателя;
- избегать попадания внутрь корпуса посторонних частиц.
Остались вопросы? Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы: 8-800-700-11-54
Установка тока шаговых двигателей 3D дельта принтера. Снижение резонансных вибраций
30.09.2016 Сайт https://anteh.ru
Они не позволяют установить максимальный паспортный ток шаговых двигателей 3х вертикальных X Y Z осей 1.7A (и это хорошо). Предельный ток для шагового двигателя экструдера(JK42HS40-1204D) 1.2A, для шаговых двигателей X Y Z осей(JK42HS60-1704A) 1.7А. Согласно документации максимальный ток у А4988 2A. Но у используемой платы драйвера A4988 его невозможно установить более 1.5A. Т.е. максимальный ток можно установить только для шагового двигателя экструдера. Связано с использованием вместо 20k резистора 30k в цепи формирования опорного напряжения платы драйвера. Сделано скорее для предотвращения перегрева и повреждения шаговых двигателей. Слишком большой ток может их повредить и в установке максимального тока нет необходимости, особенно для дельта принтера. Для дельта принтера ток устанавливаю на 30% меньше их максимального паспортного значения.
Забегая вперёд, использование дробления шага 1/32 вместо 1/16 не приведёт к увеличению разрешения принтера. Это приведёт к увеличению нагрева драйвера и двигателя, снижению момента двигателя. Не всегда использование 1/32 приведёт к снижению шума, как в режиме удержания, так и режиме хода. Поправить разрешение можно здесь. Всё будет зависеть от индивидуальных особенностей принтера, платы драйвера, шаговых двигателей. Причём оно настолько индивидуально, что при перестановке вроде бы одинаковых плат драйверов шум может уменьшиться или увеличится. Т.е. «шаманство» ещё то. В моём случае использование DRV8825 с дроблением 1/32 привело к существенному увеличению шума при удержании. Слабо уловимый свист А4988(Vref=1.2V=1.5A дробление 1/16) сменился на довольно заметное шипение/шелест DRV8825(Vref=0.85V=1.7A дробление 1/32) и только снижение тока до 0.9A поменяло шипение на еле различимый свист. Причём Y двигатель перестал шипеть при 1.2A, X при 1.1A, Z при 0.9. Перестановка одинаковых X Y Z драйверов меняет картину. В общем двигатель Y шипит/свистит существенно меньше остальных как с DRV8825 так и с А4988. Причём перестановка одинаковых драйверов меняет его шумность. Как видим всё не просто. Получается, для снижения шума нужно подбирать двигатели, драйвера, провода, мощность блока питания, напряжение питания двигателей, например поднять с 12 до 14V.
Субъективно показалось, что при 1/32 ход по Z более тихий, но были положения в которых двигатель начинал очень сильно «шелестеть» почти скрипеть и положения, в которых его было не слышно.
Фантазии по поводу разрешения. Для увеличения разрешения нужно использовать 0.9градусные двигатели вместо 1.8, с энкодером. Не дёшево и в ряде случаев это ничего, кроме опыта и морального удовлетворения не даст. Использую сопло 0.8мм толщина слоя 0.5мм, планирую на сопло 1.2 переходить. Диаметр стола 400 высота 835. Измеренная микрометром вертикальная погрешность, каждой из X Y Z осей используемого дельта принтера, при смене направления движения каретки 0.11мм. С такой погрешностью нет смысла о разрешении шагового двигателя беспокоиться, но это сравнительно малая погрешность. Используются рельсовые направляющие HIWIN, ремень GT2.
Это стандартные значения для 1.8град двигателя, дробление 1/16, ремень GT2 шаг 2мм и количество зубьев на шкиве двигателя =20. Для дробления 1/32 нужно установить Xsteps/mm, Ysteps/mm, Zsteps/mm в 160. Esteps не трогал, для него оставлен А4988.
Также можно в исходнике прошивки marlin поменять:
#define DEFAULT_AXIS_STEPS_PER_UNIT <80, 80, 80, 155>//
на:
#define DEFAULT_AXIS_STEPS_PER_UNIT <160, 160, 160, 155>//
При необходимости 4ре коэффициента можно вычислить так:
Для дельта принтера первые 3 коэффициента будут одинаковыми -это X Y X одинаковые двигатели.
360/1.8 = 200 шагов на оборот. 1.8 -угол шага.
(200*16)/(2*20) = 80 = (шагов на оборот * количество микро шагов устанавливается джамперами на RAMPS 1.4) /(приводной ремень GT2 с шагом 2 мм * 20-ти зубчатые шкивы на роторе шаговых двигателей каждой из XYZ осей)
Последний коэффициент экструдера рассчитывается так:
((200*16) / (d шкива подачи прутка * 3.14))*1.1 = (3200/(7.2мм*3.14))*1.1=
155
d шкива подачи прутка -это наименьший его диаметр в центе. Коэффициенты могут быть дробными.
Расчёт опорного напряжения, для выставления предельного тока драйвера делается так:
Для A4988:
Vrefэкструдер = 1.2А * 8 * 0.1Ом = 0.96V
Vrefxyz = 1.7А * 8 * 0.1Ом = 1.36V
Для DRV8825:
Vrefэкструдер = 1.2А * 5 * 0.1Ом = 0.6V
Vrefxyz = 1.7А * 5 * 0.1Ом = 0.85V
Значения можем уменьшить на 30%.
Для установки опорного напряжения используем любой мультиметр и отвёртку с изолированной ручкой. Включаем принтер, щуп минуса мультиметра на GND(земля) платы драйвера, плюс на движок подстроечного резистора -то что отвёрткой будем крутить. Двигатели должны быть отключены. Отвёрткой аккуратно выставляем нужное напряжение. Разные драйвера мешать можно, повторюсь соблюдайте правильную ориентацию установки драйвера, или приобретайте их с запасом.
На +5 и +12V была добавлена чип керамика 10u и 0.1u. И вместо +3.3V опоры, на подстроечный резистор, через 12k, были заведены +5V. Т.е. реализована схема как у A4988.
Ток был выставлен такой же, как и для A4988. Дробление задано такое же 1/16.
Результат:
С Vref всё было в порядке, субъективно, по показаниям осциллографа встроенные 3.3V лучше, чем внешние +5V. Т.е. предположение о повышенном шуме из-за нестабильности Vref было не верным. Доработка не нужна. Из произведённой доработки смысл есть оставить на +12V конденсаторы 10u и 0.1u.
Что касается акустического шума, с DRV8825 он субъективно стал меньше на 1/16. После autohome слышится ощутимый шелест, но при минимальном движении по X или Y наступает тишина, еле различимый свит, субъективно меньше, чем у A4988. Не обошлось без перестановки местами драйверов, шум при удержании снизился.
Единственно явное преимущество замены A4988 на DRV8825 -это снижение тепловыделения, можно смело палец на радиаторе держать сколько угодно долго. DRV8825 с током 1.2А. шаг дробления 1/16. Под платой драйвера первый второй джампера сняты, третий установлен. Если использовать шаг дробления 1/32 то тепловыделение будет больше, чем для A4988 c 1/16.
Из всего делаю выводы:
0. Со стабильностью Vref=3.3V у DRV8825 никаких проблем.
1. Для тестируемого принтера предпочтительно использование DRV8825 с шагом дробления 1/16 и с правильно выставленным током для используемой скорости печати. Снижает шум и в силу особенностей конструкции существенно снижает нагрев драйвера. Можно в цепь +12V на драйвер напаять конденсаторы, чип керамику, например 10u(или более) 25V 1206 и 0.1u 0805, хуже не будет.
2. Но если Вы решили собрать принтер сами, безопаснее использовать A4988, в отличие от DRV8825 у неё производитель выставляет безопасный ток 1A, предельный ток 1.5A, который при недосмотре не угробит, ни сам драйвер, ни двигатель. На A4988 можно в цепи питания +5 и +12V на драйвере напаять дополнительную чип керамику.
3. Единственное что позволило снизить шипение при удержании -это снижение тока и перестановка драйверов местами, дробление(для используемого принтера) осталось 1/16. DRV8825 субъективно начинал шипеть на большем токе, чем A4988. С DRV8825 печать различимо тише. Можно попробовать купить пачку другую шаговых двигателей и подобрать наименее шумные, вряд ли в этом есть смысл.
Реально и объективно замена A4988 на DRV8825, снизит тепловыделение при дроблении 1/16 и шум при печати. Перестановка драйверов местами может снизить шум/шелест при удержании двигателя. Снижение тока драйверов снижает шум, но нужно следить за отсутствием пропуска шагов. Для дельта принтера можно ставить ток на 30% и более % меньше максимального паспортного тока шагового двигателя, но нужно следить за отсутствием пропуска шагов и отсутствием вибраций эффектор. Использование дробления 1/32 увеличивает тепловыделение драйвера, снижает максимальную скорость печати и не всегда приводит к снижению аккустического шума и резонансных явлений.
Установка тока X Y Z драйверов дельта принтера
Последняя на 15.09.2016 прошивка marlin, меняем параметр DEFAULT_STEPPER_DEACTIVE_TIME с 60 на 600, чтобы двигатели не отключались через 60 секунд при простое:
#define DEFAULT_STEPPER_DEACTIVE_TIME 600
Команда autohome g28, включаем шаговые двигатели на удержание. Меряем и настраиваем токи XYZ драйверов, как 30% от максимального паспортного значения тока двигателя. По паспорту 1.7A настраиваем 1.2А.
Создаём или берём какую-либо длинную модель, растягиваем на весь рабочий стол, скорость печати задаём, например 35мм/сек, формируем G код. Высоту печати настраиваем, чтобы она началась на высоте, например 50мм от поверхности стола, филамент вытаскиваем из экструдера, реальная печать не производится. Через SD карту запускаем на печать. На LCD экране принтера скорость печати 100%, фейдером её можно до 999% довести т.е. увеличить с 35мм/сек до 35*9.99 до 350мм/сек. Смотрим максимальную паспортную скорость принтера, в текущем случае производитель заявляет 300мм/сек. Т.е. при скорости печати 35мм/сек могу произвести аппаратное увеличение скорости печати через меню принтера до 850%.
Далее, у нас есть 2 настраиваемых параметра, аппаратная скорость печати от 100%(35мм/сек) до 850%, это 35-300мм/сек и ток X Y Z драйверов. Как обратную связь контролируем пропуск шагов и вибрации эффектора при движении хотэнда по окружности и/или прямой.
Проверим пропуски шагов, настраиваем токи X Y Z в 1.2A (для 1.7А двигателей), и плавно увеличиваем скорость печати шагами по 50%. Для DRV8825 ток 1.2А заметные пропуски начинаются на 850%. Проявляются в виде щелчков и опускании плоскости печати по вертикальной оси вниз, во время щелчков экструдер понемногу приближается к столу, причём наблюдается перекос плоскости печати. Ниже 3 демонстрационных видео демонстрирующих пропуски шагов:
DRV8825 ток 1.2А скорость 300мм/сек
DRV8825 ток 1.6A скорость 300мм/сек
A4988 ток 1.2A скорость 300мм/сек
Реальная комфортная скорость для точной печати у этого принтера 25-40мм/сек, после описанных изменений. Можно печатать до 100мм/cек. Драйвер DRV8825 ток 0.8А, дробление 1/16. Максимальная скорость в районе 200мм/сек, с DRV8825, если выше, то наблюдаются пропуски.
Для DRV8825 ток 0.5А, 1/16, пропуски наблюдаются на 300% или 105мм/сек. В управляющем файле задана скорость 35мм/сек.
Тестируемый принтер, вопреки маркетинговым заявлением продавца, не будет работать со скоростью печати 300мм/сек, нужно пробовать увеличить напряжение питания шаговых двигателей.
Наблюдается некая вилка скоростей печати, при которых эффектор не вибрирует, резонансные явления минимальны. Он вообще не вибрирует, до скоростей 40-60мм/сек, далее начинает немного вибрировать в центральной части стола. Потом вибрации усиливаются и затем на 250мм/сек и более, снижаются. Увеличение напряжения питания шаговых двигателей должно увеличить скорость их работы, и соответственно скорость печати, что весьма актуально, в том числе изменить шумность работыи повлиять на резонансные явления.
На скоростях, в районе 300мм/сек и более, для тестируемого принтера, вибрации эффектора слабы. Чем плохи вибрации эффектора или резонанс? Качество печати не проверял, но помимо шума резонанс убивает механику принтера, существенно снижает момент. В любом случае 40-60мм/сек качественной печати это очень хорошо. Резонанс существенно снижает момент двигателя, дробление шага также снижает момент, но если, например при дроблении 1/8 будет наблюдаться резонанс, а при 1/16 его не будет, то можно сказать что при увеличении дробления до 1/16 момент увеличился т.к. исчез резонанс. Паразитный резонанс может снижать момент в большей степени, чем дробление.
Пока закончилось так: драйвер DRV8825, ток X Y Z =1.3A, дробление 1/16. Питание шаговых двигателей оставлено прежним +12V. На глаз — увеличение тока драйверов X Y Z приводит к снижению вибраций эффектора. Возможно, ток будет установлен в 0.6A и напряжение питания +24VDC от линейного источника питания. Об этом в других статьях