
Autoquartz, Kinetic и другие
Autoquartz, Kinetic и другие
Одним из главных недостатков кварцевых часов является необходимость замены батарейки. Чтобы избавиться от этого недостатка, часовщики использовали несколько способов.
Наиболее распространенными технологиями кварцевых часов, в которых не нужно менять батарейку, являются Kinetic/Autoquartz и EcoDrive. Обе технологии основаны на том, что часы способны «улавливать» энергию извне часов и за счет нее подзаряжать элемент питания часов. В технологии Kinetic/Autoquartz источником энергии служат движения руки человека, а в технологии EcoDrive — солнечная энергия, падающая на циферблат часов. Часы Kinetic/Autoquartz и EcoDrive не являются часами «без батарейки». И часы Kinetic/ Autoquartz, и часы с технологией EcoDrive остаются обычными кварцевыми часами с элементом питания, который может самозаряжаться. Дело в том, что батарейки, которые устанавливаются в обычных кварцевых часах, нельзя зарядить, а в часах Kinetic/ Autoquartz и EcoDrive используется не обычная батарейка, а заряжаемый элемент питания — аккумулятор или конденсатор.
Kinetic и Autoquartz — два названия одной и той же технологии. Первое использует разработчик технологии, компания Seiko, второе — ряд швейцарских компаний, выпускающих аналогичные по сути механизмы. Естественно, в данном случае мы говорим только об общей идее технологии. Каждый из выпускаемых механизмов имеет свои особенности. Например, некоторые из механизмов с технологией Autoquartz могут быть «заведены» вращением заводной головки, как в обычных механических часах. Слово «заведены» поставлено в кавыч¬ки, т.к. в данном случае на самом деле происходит не завод пружины, а зарядка аккумулятора часов.
Часы Kinetic — это кварцевые часы, не требующие замены батарейки. В них кинетическая энергия движения руки человека преобразуется в электрическую, питающую механизм часов. Механизм Kinetic является симбиозом кварцевых часов и механических часов с автоподзаводом. При движениях руки груз, аналогичный грузу в часах с автоподзаводом, вращается вокруг оси и через систему шестерен вращает ротор генератора. Электрический ток, вырабатываемый генератором, заряжает накопитель энергии — конденсатор.
Чтобы генератор смог выработать ток нужного напряжения, ротор должен вращаться с большой скоростью. Если в механических часах колесная передача от груза автоподзавода до барабана уменьшает обороты, то в KINETIC наоборот. Колесная передача часов KINETIC обеспечивает скорость вращения ротора до 100 000 оборотов в минуту (это примерно в 5 раз больше числа оборотов двигателя болида Формулы-1). При таких больших скоростях главной проблемой становится трение в опорах ротора. Для уменьшения трения генератор сконструирован так, что ротор висит в магнитном поле, как в невесомости, почти не касаясь опор. Благодаря магнитной подвеске ось, имеющая на концах диаметр в 3-4 раза тоньше человеческого волоса, спокойно выдерживает вес ротора, который примерно в 20 раз тяжелее ротора шагового двигателя, Технологическим шедевром считаются изготовленные с высочайшей точностью миниатюрные опоры оси ротора. С той же целью — уменьшения трения — была разработана специальная смазка для опор, обладающая малой вязкостью.
При резких движениях, например, при ударе рукой по столу, груз может начать вращаться во много раз быстрее обычного. Чтобы предотвратить разрушение цапф оси ротора необходимо ограничить скорость его вращения. Для этого в передаче использована фрикционная муфта. Она выглядит как обычное колесо с трибом, но колесо сидит на оси не жестко, а с некоторым трением. При нормальных скоростях триб вращается вместе с колесом, но при резких ускорениях триб муфты проворачивается относительно колеса, предохраняя ротор. Ротор генератора,вращающийся с огромной скоростью, должен быть отбалансирован с очень высокой точностью, иначе он просто разрушит часы.
Впрочем, часы с подобными технологиям не пользуются большой популярностью у покупателей, отдающих предпочтение скорее кварцевым моделям. В связи с этим производителям приходится изобретать различные способы увеличения автономности кварцевых часов, т.е. срока, в течение которого они могут работать без замены батарейки или подзарядки. Автономность кварцевых часов зависит от двух факторов: емкости источника пита¬ния и потребляемого часами тока. Потребляемый ток зависит от конструкции механизма, и в наибольшей степени от наличия дополнительных устройств: подсветка, хронограф, сигнал, других функций часов, потребляющий много энергии. Также влияние оказывают такие характеристики самой батареи, как ток саморазряда, способ¬ность батареи не терять герметичность в течение какого-то срока. Некоторые компании используют ряд энергосберегающих технологий, основанных на одной идее: на время, в которое часы не используются, в них отключается ряд узлов, требующих существенного количества энергии. Например, компания Seiko создала принципиально новый механизм, использующий кинетическую энергию движения и перерабатывающий ее в электрическую, получивший название система Seiko Kinetic.
Механизм кварцевых часов состоит из нескольких функциональных блоков: генератор колебаний, электронный блок, который подсчитывает колебания и переводит их в понятное нам время, индикатор, т.е. система шестерен, вращающих стрелки, или LCD-дисплей. Большая часть энергии потребляется именно индикатором. Идея конструкторов состоит в том, чтобы на время, когда часы не используются, «отключать» индикацию. Так, например, в часах Kinetic Auto Relay останавливаются стрелки, а в цифровых часах Casio «гаснут» цифры на дисплее. Внешне часы «спят», но электронный блок продолжает отсчитывать время. И после того как владелец возьмет часы в руки, специальный датчик активизирует механизм и тот автоматически выставит правильное время.
В 1999 году японская компания SEIKO объявила об очередном технологическом прорыве — создании Kinetic Auto Relay. Эти часы способны показывать правильное время, даже если в них не меняли батарейку или не пользовались до четырех лет. Большая часть энергии в кварцевых часах — около 85% — расходуется на вращение стрелок, и лишь 15% затрачивается на работу их электронной части, которая, собственно, и отсчитывает время. Электронный мозг часов Kinetic Auto Relay может останавливать стрелки, экономя за счет этого энергию для более длительной работы.
Kinetic Auto Relay созданы на базе технологии Kinetic, но имеют особый электронный блок, и не один, как в обычных кварцевых часах, а несколько шаговых двигателей. Когда Kinetic Auto Relay носят на руке, стрелки двигаются, как обычно. Если же часы остаются неподвижными более чем 72 часа, они переходят в режим сбережения энергии — электронное устройство останавливает стрелки. При этом потребление энергии уменьшается более чем в 6 раз.
Но даже когда стрелки остановились и часы находятся в режиме сбережения энергии, электронный блок продолжает отсчитывать время. Стоит немного пошевелить часы, чтобы груз автоподзавода пришел в движение. После этого, как по команде электронного мозга, высокоскоростной шаговый двигатель установит на правильное текущее время часовую и минутную стрелки, а затем другой шаговый двигатель выставит и секундную стрелку. Ручной настройки может потребовать только календарь.
Срок, в течение которого часы могут работать в «спящем» режиме, зависит от накопленной энергии. При полной зарядке они будут отсчитывать время в течение четырех лет.
Моторы и шаговые двигатели
Наверняка каждому из нас еще с детства знакомы такие небольшие изделия, как электромоторчики. Несмотря на свои скромные габариты и простоту внешне, они имеют полноценный механизм электрического двигателя, о чем мы вряд ли могли знать ранее. Такие устройства используются и до сегодняшнего дня в различных видах детских игрушек, и мелкой технике. Прежде чем купить моторчик для своей цели, мы настоятельно рекомендуем ознакомиться с информацией о том, что же представляет собой данный агрегат. Электромоторчик представляет собой полноценную электро машину, особенностью которой является преобразование энергии из электрической в механическую. Основной показатель работоспособности — это постоянное выделение тепла.
В большинстве случаев используется двигатель постоянного тока, купить который вы сможете без труда на нашем сайте. Этот агрегат питается с помощью постоянного тока, но не стоит забывать, что такое устройство не вечно. Рано или поздно его внутренние детали могут выйти из строя либо износиться вовсе, поэтому часто требуется полная замена. Такой принцип работы, как преобразование энергии из одной формы в другую, был известен уже с 1800 годов, однако на сегодняшний день он совершенен и все так же набирает популярность. В современных игрушках для маленьких детей используются простейшие механизмы, которые предлагают четко продемонстрировать принцип функционирования устройства.
Моторчики для игрушек — где купить выгодно и надежно?
Итак, вам необходимо приобрести dc мотор, но вы не знаете, где лучше сделать заказ. Перед покупкой вы уже ознакомились с тем, что же представляет собой данное устройство, но и этого не всегда достаточно. Мы рекомендуем обращать внимание на такие аспекты, как сила, скорость вращения, величина, нагрузка, диаметр устройства, мощность, потребление энергии, наличие режимов. Зная все эти параметры, вы точно не ошибетесь и сделаете правильный выбор. Любая характеристика может повлиять на скорость игрушечного автомобиля или другого изделия, что также следует учитывать. Перед тем, как электромоторчик для игрушек купить, уточните у продавца:
- на какое количество оборотов он рассчитан. Все модели должны изготавливаться в соответствии с установленными нормами и требованиями;
- каковы гарантии работоспособности. Современные конструкции служат достаточно долго даже при регулярном применении;
- дополнительные характеристики или особенности. Важно понимать также такой параметр, как напряжение. Не забудьте узнать полную информацию.
Электромоторчики для моделей — купить быстро и недорого стало реально
Для того чтобы по доступной цене электрический моторчик купить — достаточно сделать заказ на сайте. Процесс оформления заявки займет всего несколько минут, и в ближайшее время вы сможете получить желаемый товар по адресу. Главным преимуществом сотрудничества с интернет-магазином Robostore для вас является гарантия получения качественного оборудования для радиотехники. Только на этом сайте вы сможете купить электромоторчики исходя из потребностей выгодно и надежно. При необходимости, вы можете задать любой вопрос касательно товаров этой категории в режиме онлайн или по телефону.
Шаговый двигатель. диагностика, ремонт, описание. статья переработана

статья приведена в приличный вид, ввиду вчерашней переборки ШД — добавлено.
копипаст моей статьи. изначально делал ее для вингроад.ру, после того как осознал всю систему управления холостым ходом и шаговый двигатель в частности.
Шаговый двигатель:
принцип работы, разборка, ремонт.
для поиска: iacv КПХХ ХХ холостой ход шаговый двигатель ремонт разборка
сокращения:
ШД — шаговый двигатель
КХХ — клапан холостого хода
ХХ — холостой ход
ДЗ — дроссельная заслонка
принцип работы ШД, ютуб
возможные неисправности ШД
— замыкание обмоток. обычно проявляется после протекания прокладки КХХ.
— выгорание микросхем в ECU — опять же после протекания прокладки КХХ. Антифриз попадает на двигатель, коротит его, а он, с свою очередь, выжигает мозги.
-отсутствие контакта.
-подклинивание штока.
-физическое разрушение пластмассовых внутренностей ШД.
-закисание подшипника.
зачастую проблема проявляется после замены прокладки КХХ, чистки ШД, либо на пробегах за 200 000 км.
итак- заводится машина нормально. при нажатии на газ может заглохнуть, при включении электропотребителей обороты проседают, начинается вибрация.
ПРОВЕРКА, СНЯТИЕ РАЗБОРКА.
демонтаж шагового двигателя.
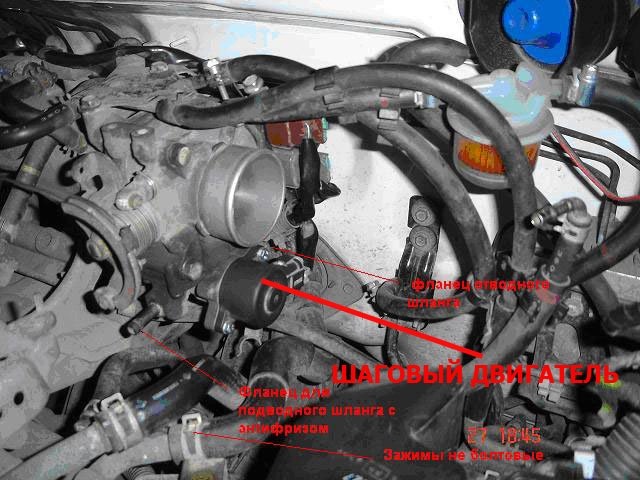
0. — схема расположения элементов КХХ

1. снимаем гофру воздушного фильтра.
2. откручиваем 2 болтика ШД.
3. отсоединяем разъем. (закисает, снимать аккуратно, подцепив отверткой. ломается на ура)
проверка шагового двигателя
1. включить зажигание, ШД должен зажужжать, позиционируя свое положение.
2. выключить зажигание, вытащить щаговый двигатель, включить зажигание — «игла» ШД должна двигаться.
3. проверить сопротивление обмоток
5 шд
берем цешку и проверяем
при комнатной температуре между контактами 1-2, 2-3, 4-5, 5-6 должно быть сопротивление около 20-24 ом.
при комнатной температуре между контактами 2-1, 2-3 и 5-4, 5-6 должно быть сопротивление около 20-30 ом
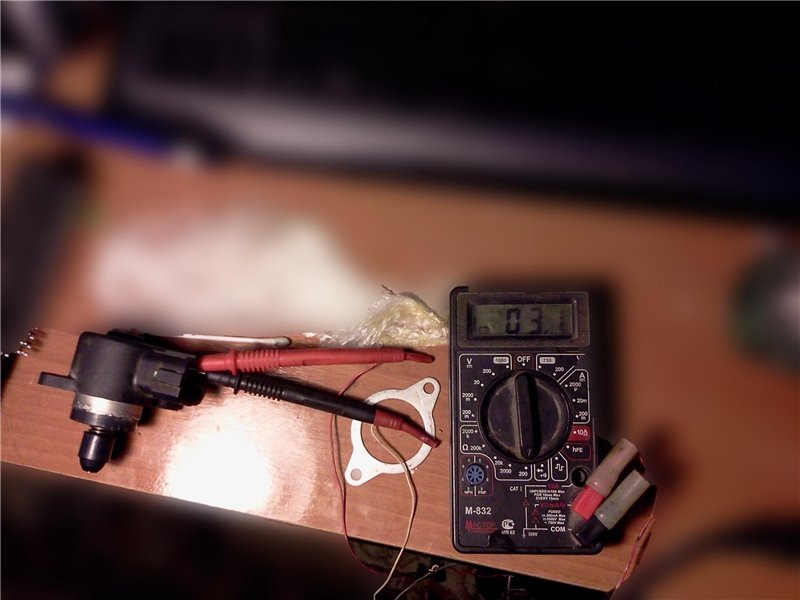
так же можно подать 4-6 вольт на обмотки. игла должна двигаться. 12в не надо! есть риск его сжечь.
диагностика
если ШД не жужжит и игла не двигается — проверить провода на разрыв.
если ШД не работает после протечки прокладки — скорее всего у вас выгорела микросхема ST509A в блоке ECU.
подробнее в самом низу статьи
если ШД жужжит, но игла не двигается, скорее всего внутренности шагового двигателя загрязнены или сломаны пластамассовые детальки. возможно закисание подшипника.
ШД типа не разборный, но только не в России.
разборка шагового двигателя
понадобится:
маленькие плоскогубцы, кусачки, отвертка.
1. кладем ШД перед собой иглой вверх.
2. берем маленькие плоскогубцы и начинаем аккуратно отгибать завальцовку. отгибать нужно не сильно, за пару проходов — что бы не порвать фальц.
когда будет готово — окончательно разворачиваем завальцовку отверткой

после чего, двигая иглу из стороны в сторону и вверх, вытаскиваем ее вместе с ротором из корпуса

вытаскиваем ротор из корпуса

вид разобранного узла. грязища прилагается.

разобрав корпус, видим что ШД — электромагнит с 4 обмотками. игла — это ротор, который выдвигается на необходимое количество шагов.
разбираем ротор, открутив иглу ШД.
чистим внутренности. я чистил очистителем карбюратора, потом опустил в изопропиловый спирт. твердые отложение можно отковырять отверткой или зубочисткой.
проверяем целостность пластиковых деталек. если сломано — суперклей в помощь. нагрузки в нем минимальны.
также надо проверить легкость вращения подшипника. если крутится плохо — отверткой отковыриваем пыльник, вычищаем всю гадость изнутри подшипника (у меня там были антифризные сопли и твердые отложения). сам подшипник — в бензин или растворитель. потом смазываем и ставим пыльник обратно.
после чего смазываем все, кроме статора и ротора.
сборка шагового двигателя
порядок сборки такой:
на иглу надеваем пружинку, затем крышку, под крышку — упор, под упор — подшипник. иглу закручиваем в магнит. собранный ротор с крышкой — в корпус ШД. прижимаем пальцами, и начинаем завальцовывать.
так же, как и открывали — аккуратно, в несколько проходов. можно для верности легонько постучать по завальцовке и по краю пройтись герметиком. лишь бы он во внутрь не попал.
вид заново завальцованного шд

ставится в отверствие в КХХ, прикручиваются 2 болтика, надевается гофра со всеми трубочками[/spoiler]
ПОСЛЕ УСТАНОВКИ ОБУЧИТЬ ХХ!
Удостовертесь, что все следующие условия удовлетворены.
«Обучение КХХ» будет отменено, если любое из следующих условий будет пропущено:
+Напряжение АКБ больше чем 12.9V (при неработающем двигателе).
+Температура антифриза: 70 — 99°C (158 — 210°F).
+Выключатель PNP: on (т.е. парк или нейтраль)
+Потребители электричества: off
(кондиционер, фары, стеклоподъемники)
+Двигатель вентилятора: не работает.
+Руль: нейтральный (прямое положение).
+ Скорость автомобиля: полная остановка.
+Трансмиссия: прогрето.
Обучения для моделей с трансмиссией A/T без сканера CONSULT-II:
1. Включить зажигание и ждать по-крайней мере 1 секунду.
2. Выключить зажигание и ждать по-крайней мере 10 секунд.
3. Прогреть двигатель до нормальной рабочей температуры.
4. Проверить, что все пункты перечисленные выше удовлетворены.
5. Выключить зажигание и ждать по крайней мере 9 секунд.
6. Завести двигатель и дать ему поработать в течение по-крайней мере 28 секунд.
7. Разъединить верхний контакт датчика (коричневый цвет), соединить в течение 5 секунд.
8. Ждать 20 секунд.
9. Удостоверьтесь, что ХХ — в пределах нормы. В противном случае найдите причину
проблемы (см. ниже).
10. Увеличить обороты двигателя в два или три раза. Удостоверьтесь, что обороты приведенные ниже в пределах нормы.
ХХ M/T: 700 плюс-минус 50 оборотов в минуту
ХХ АТ: 800 плюс-минус 50 оборотов в минуту (в положении селектора в положении «P» или «N»)
Неофициальный алгоритм (как писал один с вингроад.ру, говорит, что получилось):
Двигатель должен быть прогрет, все потребители выключены. Глушим двигатель и отсчитываем 10 секунд. Включаем зажигание (но не заводим), отсчитываем 10 секунд. Выключаем, вытаскиваем ключ, отсчитываем 10 секунд. Включаем зажигание (но не заводим), идем к двигателю, по пути отсчитываем 30 секунд. Под капотом слышно жужжание. Сдергиваем верхнюю фишку, ждем пока жужжание не прекратится. Одеваем фишку, отсчитываем 20 секунд. Не выключая зажигание заводим двигатель. Едем![/spoiler]
кто осилил до конца — ставьте лайки) надеюсь всем винговодам пригодится инфа.
LXF155:Крутить моторчик
| Подписка на печатную версию Весь 2015 год (12 номеров) Первое полугодие (6 номеров) Второе полугодие (6 номеров) | Подписка на электронную версию Весь 2015 год (12 номеров) Первое полугодие (6 номеров) Второе полугодие (6 номеров) | Подшивки старых номеров журнала (печатные версии) Весь 2014 год (12 номеров) Первое полугодие (6 номеров) Второе полугодие (6 номеров) |
Arduino Управляем сервопориводами и шаговыми двигателями
Arduino: Моторы и движение
Пора двигаться дальше – Ник Вейч заставляет колеса крутиться.
Когда LXF только появился, его держали на плаву исключительно скрипты Bash от Ника Вейча. Потом их заменили «люди», и это, по мнению Ника, стало шагом назад.
С тех самых пор, как Майкл Фарадей начал экспериментировать с проводниками в чашках со ртутью, в электронике, пожалуй, ничем не доставить большего и мгновенного удовлетворения, как привести что-то в движение.
Схемы Arduino обычно используются для управления роботами, но роботы не могут побежать, прежде чем сделают первый неуверенный шаг, поэтому здесь мы рассмотрим основы двигателей и сервоприводов.
Говоря о сервоприводе, обычно имеют в виду устройство, чаще всего встречающееся в радиоуправляемом оборудовании, где оно применяется для управления рулем или другими движущимися частями.
Этот тип сервопривода – обычно сочетание нескольких элементов: двигателя, который дает энергию; шестерней, соединяющих двигатель с его приводным рычагом (который может иметь различную форму и размеры); и устройства обратной связи, обычно потенциометра, с помощью которого сервопривод может точно определить положение рычага.
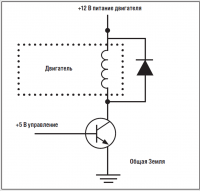
Для схем с сервоприводом вам понадобится обычный RC-сервопривод, ничего больше. Для шаговых двигателей нужен сам двигатель (см. врезку «Закупаемся шаговыми двигателями»), набор транзисторов и диодов или микросхема H-Bridge, типа L239D.
Сервопривод имеет три провода: по красному и черному обычно подается напряжение питания, по третьему, как правило, желтому или оранжевому – управляющий сигнал. Сервоприводы работают от аналоговых управляющих сигналов, использующих токовый импульс. Ширина импульса определяет положение рычага.
По соглашению, импульс длительностью 1,5 мс перемещает сервопривод в нейтральное положение, среднюю точку – между начальной и конечной точками, а весь диапазон возможных положений покрывает ширина импульсов от 1 до 2 мс.
Для питания одного небольшого RC-сервопривода достаточно линии питания Arduino +5 В, но если их больше, подключите более подходящий источник питания. К счастью, RC-сервоприводы обычно прекрасно работают от напряжения 5 или 6 В, поэтому Arduino и все сервоприводы можно подключить к одному внешнему источнику.
Для формирования импульса не нужен высокий ток, и для их питания не нужны дополнительные реле или транзисторы, что тоже хорошо, поскольку на коротких интервалах времени, с которыми мы работаем, с ними могут возникнуть трудности.
На самом деле, эти временные интервалы могут помешать эффективному управлению сервоприводом из кода Arduino. К счастью, существует стандартная библиотека, с редкой креативностью названная Servo. Если вы подключите свой сервопривод в соответствии с рис. 1, то сможете поэкспериментировать с ним и обнаружить его пределы.
Стандартный пример кода для нашей ситуации – шаблон под названием “Sweep”, который можно найти в примерах, поставляемых с Arduino. В нем для постепенного изменения положения сервопривода от 0 до 180 градусов используются функции позиционирования. Однако, если вы не уверены в предельных значениях для своего устройства, сначала можно попробовать что-нибудь попроще.

- include
Servo servo1; // create servo object
Метод .writeMilliseconds() не содержит код, преобразующий угол в ширину импульса, и просто формирует импульс заданной длительности. Эти значения можно уменьшать и увеличивать до тех пор, пока привод не перестанет двигаться, а затем использовать их в качестве предельных при инициализации устройства:
Параметры этой функции – номер вывода, минимальная ширина импульса и максимальная ширина импульса. Здесь мы используем для сервопривода вывод 9 – именно этот вывод используется чаще всего. В старых версиях кода Arduino библиотека работала только с выводами 9 и 10, и даже сейчас на всех платах, кроме Mega, вызов библиотеки сервопривода приведет к тому, что на этих выводах перестанет работать ШИМ (широтно-импульсная модуляция), поэтому можете воспользоваться и ими.
Если вы хотите или вам нужно записывать данные в сервопривод вручную, воспользуйтесь встроенной функцией map:
которая промасштабирует входное значение между первой парой чисел в соответствующее значение между второй парой чисел.
Основа шагового двигателя – статор, соединенный непосредственно с осью двигателя. Статор окружен постоянными магнитами с чередующимися полюсами, направленными наружу.
Статор окружает набор металлических сердечников, обмотанных проводниками. Между проводниками и статором есть небольшой зазор, чтобы двигатель мог вращаться. Когда через эти проводники пропускают ток, сердечник намагничивается северным или южным магнитным полюсом в зависимости от направления тока.
Намагниченные сердечники отталкивают или притягивают постоянные магниты статора, вызывая его поворот. Последовательная подача тока на проводники позволяет вращать двигатель в любом направлении или моментально его остановить.
Число сердечников и магнитов в статоре определяет угловое разрешение двигателя. Это значение существенно различается и в распространенных двигателях составляет от 1,8 градуса (200 шагов на полный оборот) до 30 градусов (12 шагов). Двухполюсные двигатели позволяют обеспечить большую плотность использования сердечников, и поэтому с ними обычно легче получить больший вращающий момент при небольших габаритах.
Сервоприводы полезны для управления всеми видами робототехники, а также для радиоуправляемых самолетов. Пожалуй, самое простое, что можно сделать с их помощью – измерить физический угол. Кроме сервопривода, понадобится только микропереключатель, подключенный к «плечу» или движущемуся рычагу сервопривода. Затем можно подвесить это к цифровому входу и проверять его в каждом цикле (или вместо этого употребить прерывания – см. предыдущую статью) чтобы увидеть, коснулся ли рычаг чего-либо, см. Схему 1.

