Шаговый двигатель 3D
Шаговый двигатель 3D
В современной электротехнике и машиностроении достаточно широко используются шаговые электродвигатели. Они относятся к категории электрических машин постоянного тока, а принцип их работы основывается на том, что импульсная электрическая энергия преобразовывается в механическое перемещение дискретного вида.
Шаговые электрические двигатели имеют целый ряд особенностей, главной из которых является то, что на низких скоростях они обладают большим значением крутящего момента. В отличие от них, к примеру, коллекторные двигатели характеризуются возрастанием крутящего момента только в том случае, если увеличивается скорость.
С точки зрения конструкции шаговые электродвигатели гораздо более сложны, чем электрические двигатели коллекторные. Это касается, прежде всего, намного более сложной системой управления ими. Она устроена таким образом, что, в отличие от других электрических двигателей постоянного тока, обеспечивает коммутацию обмоток.
Сейчас разработчики при проектировании всех разновидностей шаговых двигателей практически всегда используют специализированные компьютерные программные пакеты, с помощью которых создаются трехмерные (3D) модели этих силовых агрегатов. Благодаря такому подходу к конструированию существенно облегчается и упрощается проведение всех необходимых расчетов, к тому же сама процедура создания шагового электрического двигателя новой модели становится действительно творческой.
Все современные шаговые электрические двигатели подразделяются специалистами на три основные разновидности:
- С постоянными магнитами;
- С переменным магнитным сопротивлением;
- Гибридные.
Шаговые электрические двигатели с постоянными магнитами имеют в своей конструкции такие основные элементы, как ротор (именно на нем и установлены постоянные магниты) и статор, на котором располагаются обмотки. Благодаря тому, что в таких двигателях ротор намагничен постоянно, соответственно постоянно наличествует и достаточно мощный магнитный поток, который, в своею очередь, обеспечивает большой крутящий момент.
Шаговые электрические двигатели с переменным магнитным сопротивлением характеризуются тем, что в их конструкции имеется несколько полюсов. На каждом из которых располагается своя собственная независимая обмотка, причем находятся они попарно, то есть на различных полюсах. Что касается такого важнейшего элемента конструкции, как ротор, то он изготавливается из специального магнитомягкого материала и имеет зубчатую форму.
Что касается гибридных шаговых электрических двигателей, то они существенно дороже, чем шаговые электрические двигатели с постоянными магнитами. Однако при этом они имеют следующие преимущества: большую скорость, большой момент, меньшую величину шага. Таким образом, можно констатировать, что в гибридных двигателях удачно сочетаются лучшие черты двигателей с постоянными магнитами и двигателей с переменным магнитным сопротивлением. В гибридных конструкциях на статорах имеются зубцы, которые обеспечивают значительное количество эквивалентных полюсов, отличающихся по своему знаку на тех полюсах, что располагаются обмотки. Роторы гибридных шаговых электрических двигателей имеют две части, между которыми находится постоянный магнит цилиндрической формы. Получается, что зубцы одной из половинок имеют северную, а зубцы другой из половинок – южную полярность.
В зависимости от того, какую именно конфигурацию имеют обмотки, шаговые электрические двигатели подразделяются на униполярные и биполярные. Униполярные имеют одну обмотку в каждой фазе, причем от ее средины сделан специальный отвод. Благодаря ему появляется возможность изменять направление магнитного поля. Биполярный такого отвода не имеет, а включает в себя две обмотки и, соответственно, имеет четыре вывода.
Шаговые электрические двигатели широко и успешно применяются в таких устройствах, как принтеры, сканеры, плоттеры, факсы, дисководы, а также специализированное промышленное оборудование.
В чем особенности шагового двигателя
Специфика конструкции шаговых двигателей и многообразие режимов их работы вызывают необходимость оценивать эти двигатели по следующим параметрам:
- частота собственных круговых колебаний
- электромагнитная постоянная времени
- коэффициент внутреннего демпфирования
- предельная механическая характеристика
- предельная динамическая характеристика
Частота собственных круговых колебаний – это угловая частота колебаний ротора около устойчивого положения при отсутствии момента нагрузки. Она является обобщенным параметром, зависящим от момента инерции J, амплитуды максимального синхронизирующего момента Mmax, числа пар полюсов p. Период собственных круговых колебаний, равный 1/w0, может служить внутренним эталоном времени. Действительно, момент инерции J определяет инерционность двигателя и механизма, амплитуда максимального синхронизирующего момента Mmax даетхарактеристику шагового двигателя как преобразователю энергии, число пар полюсов p определяет степень электромеханической редукции угла поворота и скорости вращения. Отношение Mmax/J дает теоретически предельное ускорение ротора шагового двигателя.
Электромагнитная постоянная времени обмоток управления Tэм = L/R характеризует скорость протекания электромагнитных переходных процессов. Часто для уменьшения Тэм последовательно с обмоткой управления включают добавочное сопротивление. Уменьшать постоянную времени необходимо потому, что чем она больше, тем до меньшего значения нарастает ток за время импульса напряжения, меньше становится синхронизирующий момент, а, следовательно, и допустимый момент сопротивления.
Коэффициент внутреннего демпфирования определяется отношением амплитуды потокосцепления ротора с фазой обмотки статора к ее активному сопротивлению. Этот параметр относится только к шаговым двигателям с активным ротором, поскольку его физический смысл заключается в образовании электромагнитного тормозного момента, вызванного взаимодействием поля ротора с током статора, наведенным этим полем и замыкающимся по цепи статор-источник тока. При этом механическая энергия колеблющегося ротора превращается в электрическую энергию с последующим рассеиванием ее в теплоту в активных сопротивлениях обмоток статора.
Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы. С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю.
Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки.
Режимы работы шаговых двигателей
Характер движения ротора шагового двигателя определяется частотой и характером изменения управляющих импульсов. В зависимости от этого различают следующие режимы работы шаговых двигателей:
- статический;
- квазистатический;
- установившейся;
- переходный.
Статический режим – это режим, при котором по обмоткам статора протекает постоянный ток, создающий неподвижное в пространстве магнитное поле, а ротор не вращается. Под действием нагрузки ротор лишь отклоняется от положения М = 0 на некоторый угол q. Основной характеристикой этого режима является зависимость статического синхронизирующего момента от угла рассогласования M = f(q).
Квазистатический режим – это режим отработки единичных шагов, при котором переходные процессы от предыдущего такта коммутации полностью затухли и скорость ротора в начале следующего шага равна нулю. Он используется в стартстопных, лентопротяжных и других механизмах, в которых требуется фиксация ротора после каждого шага. Предельная частота управляющих импульсов, при которой еще соблюдается квазистатический режим, определяется временем протекания электромагнитных и особенно электромеханических переходных процессов, т.е. временем колебаний ротора. Для уменьшения или полного устранения качаний ротора в конце шага применяют различные приемы. При принудительном торможении после перевода управляющего импульса с первой обмотки или группы обмоток на вторую через некоторый промежуток времени, в течении которого ротор отработает часть шага и запасет определенное количество кинетической энергии, управляющий импульс вновь переводится на первую обмотку. На ротор начинает действовать тормозной момент. При правильном выборе времени и величины тормозящего момента ротор остановится в конце шага, после чего управляющий импульс переводится на вторую обмотку и ротор, отработав шаг, фиксируется в заданном положении практически без колебаний. При естественном торможении отработка шага происходит в два этапа: на первом этапе движение ротора осуществляется за счет положительного приращения момента, возникающего при сдвиге НС статора на часть полного шага; на втором этапе – за счет кинетической энергии, запасенной ротором при отрицательном (тормозном) моменте. При достижении ротором заданного положения НС сдвигается на оставшуюся часть шага и фиксирует ротор в этом положении. Естественное торможение возможно лишь в тех шаговых двигателях, у которых полный шаг можно поделить на несколько элементарных шагов. Повысить предельную частоту квазистатического режима можно путем увеличения числа обмоток статора или числа тактов коммутации. Во всех этих случаях снижается угол перемещения и кинетическая энергия ротора, что уменьшает его склонность к качаниям.
Установившийся режим – это режим, соответствующий постоянной частоте следования управляющих импульсов. При частоте управляющих импульсов f1, меньшей частоты собственны колебаний двигателя f0, движение ротора носит колебательный характер, что увеличивает динамическую ошибку при отработке заданного перемещения. При малых возмущениях частота собственных колебаний ротора где Mmax – максимальный статический синхронизирующий момент; Jp ,Jн- момент инерции ротора и нагрузки, приведенные к валу двигателя; р –число пар полюсов. При значительных возмущениях При частоте управляющих импульсов f1 = f0/k, где k – целое число, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может привести к нарушению нормального движения ротора и выпадению его из синхронизма. При f1> f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы шагового двигателя необходимо, чтобы
Mн/Mmax Страница находится в разработке. В оглавление (шаговый двигатель)
Особенности конструкции и принципа работы шагового двигателя активного типа.
Шаговые синхронные двигатели активного типа. В отличие от синхронных машин
непрерывного вращения шаговые двигатели имеют на статоре явно выраженные
полюса, на которых расположены катушки обмоток управления.
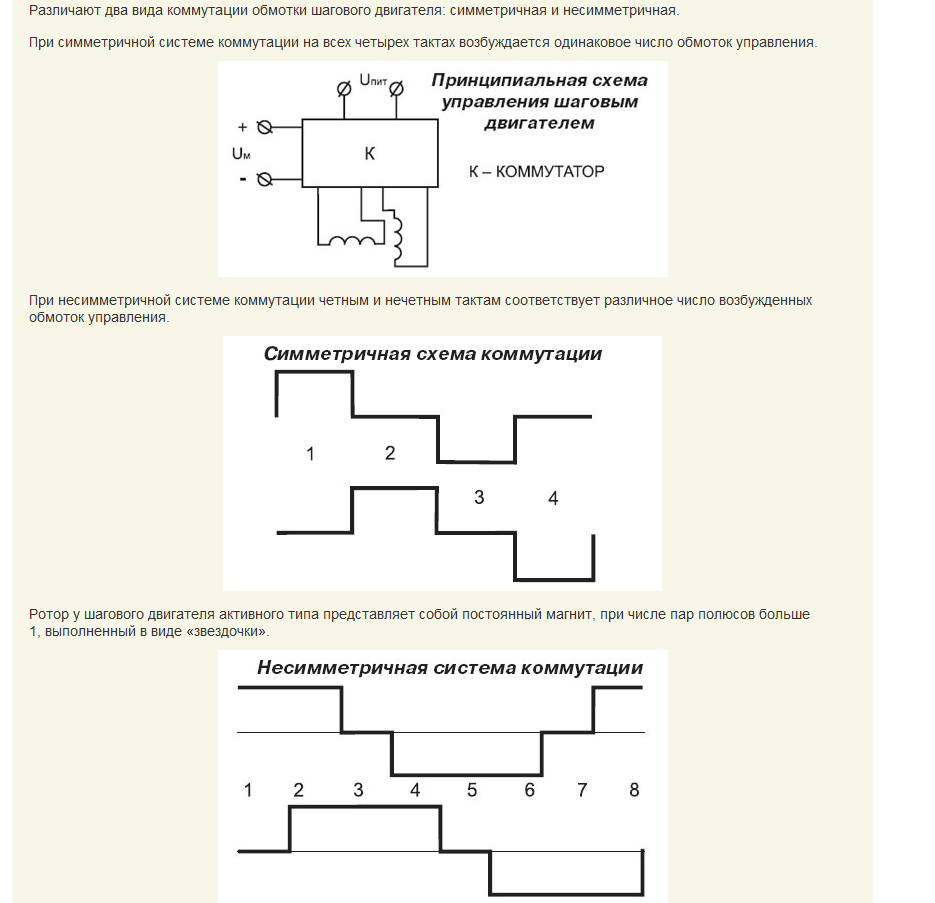
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления
Особенности конструкции и принципа работы реактивного шагового двигателя.
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора
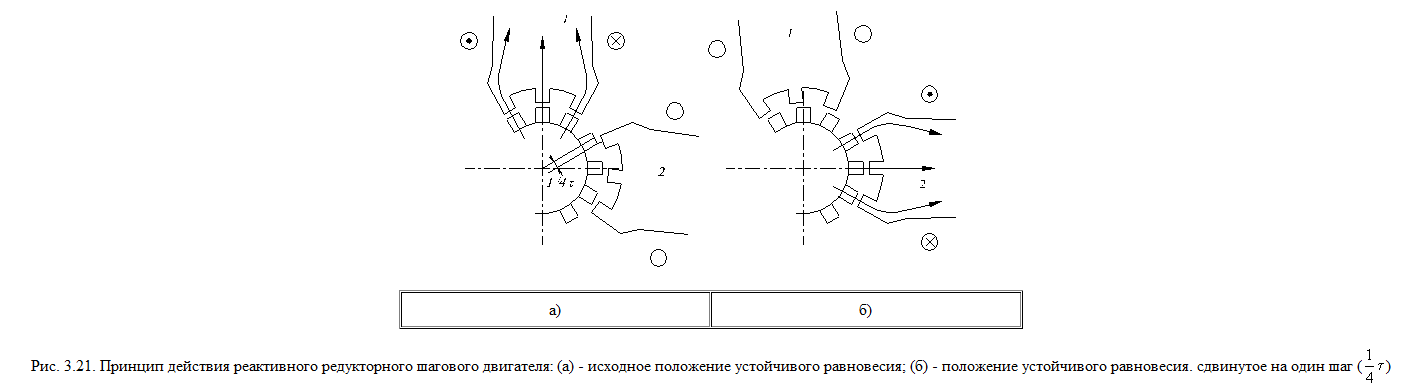
Если зубцы ротора соосны с одной диаметрально расположенной парой полюсов статора, то они сдвинуты относительно каждой из оставшихся трех пар полюсов статора соответственно на ј, Ѕ и ѕ зубцового деления.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают.
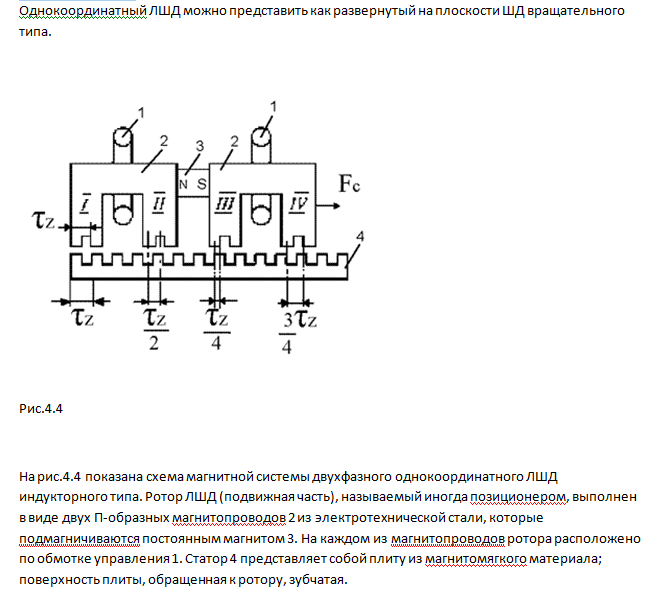
Особенности конструкции и принципа работы линейного шагового двигателя.
Линейные шаговые двигатели (ЛШД) преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет значительно упрощать кинематическую схему ряда электроприводов, устраняя механические преобразователи вращательного движения в поступательное.
На базе ШД и ЛШД могут быть созданы многокоординатные исполнительные механизмы, осуществляющие сложные перемещения в декартовой, цилиндрической и сферической системах координат.
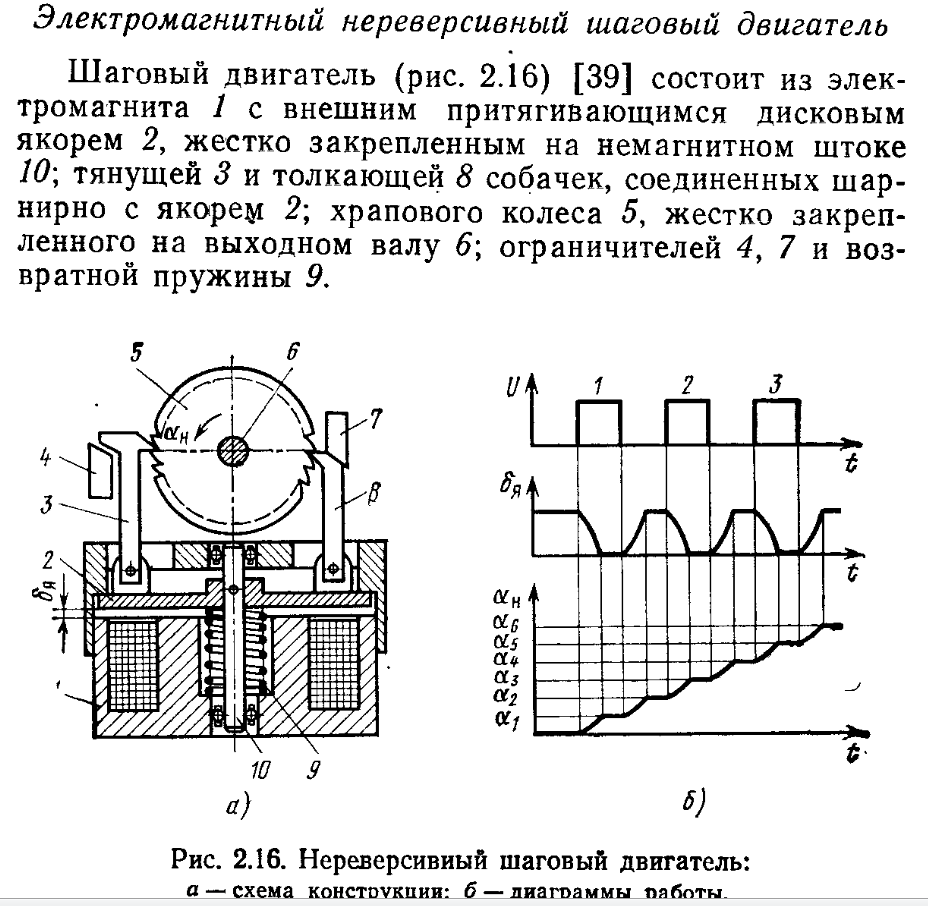
Шаговый двигатель нереверсивного типа.
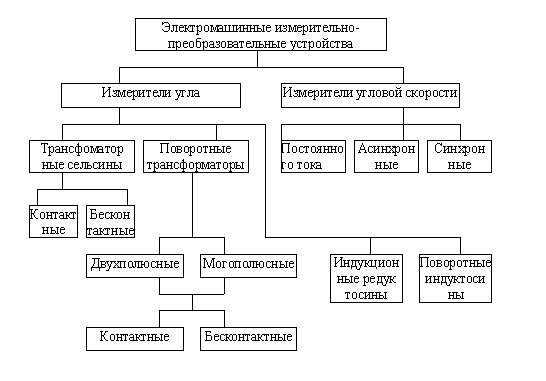
Сельсины – конструкция, принцип работы и характеристики. Индикаторный режим.
Классификация основных типов электромашинных измерительно-преобразовательных устройств, применяемых для реализации обратных связей по углу и скорости, приведена
Сельсинами называют электрические микромашины переменного тока,обладающие способностью самосинхронизации и применяемые в синхронных системах дистанционной передачи угла в качестве датчиков и приемников. Передача угловой величины в такой системе происходит синхронно, синфазно и плавно. При этом между устройством, задающим угол (датчиком), и устройством, принимающим передаваемую величину (приемником), существуют только электрические соединения в виде линии связи.
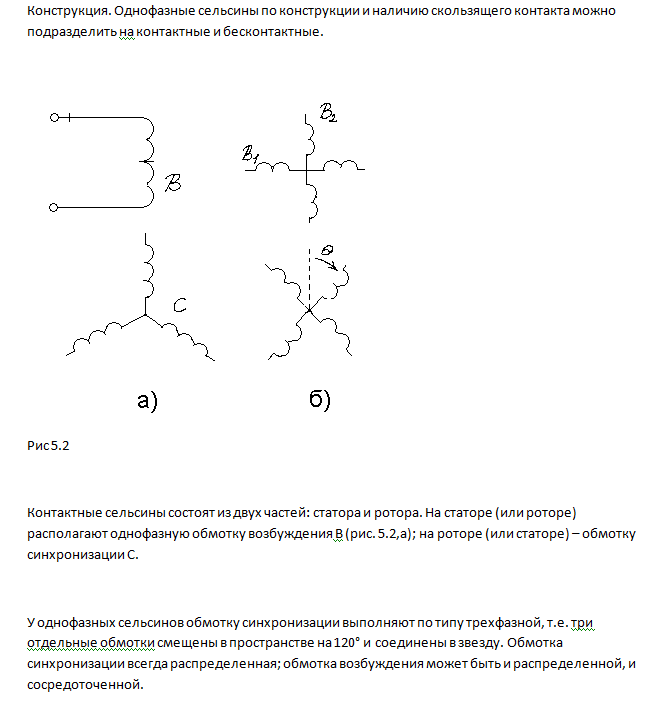
Индикаторный режим используется при отсутствии другого исполнительного двигателя. Синхронизирующий момент между валами сельсина- датчика и сельсина- приемника создается при наличии некоторого пространственного угла =-, называемого углом рассогласования. Появляющиеся при этом ЭДС обеспечивают протекание тока по обмоткам синхронизации датчика и приемника. В результате в сельсине- приемнике возникает момент, старающийся повернуть его вал на угол равный углу поворота датчика. Из — за наличия механической нагрузки на валу приемника угол рассогласования, как правило, больше нуля.
Электродвигатель – это датчик! Часть I: технологии stallGuard™ и coolStep™ от Trinamic
Микросхемы для управления шаговыми двигателями от компании Trinamic хорошо знакомы отечественным разработчикам. Они отличаются широким функционалом, позволяют максимально упростить создание приводов и сократить время на разработку. Одним из факторов популярности драйверов и контроллеров Trinamic стали встроенные фирменные технологии: stallGuard2™, coolStep™, spreadCycle, stealthChop™, dcStep™, microPlyer™, sensOstep™. В данном цикле статей мы попробуем рассказать о каждой из этих технологий, чтобы помочь разработчикам, которые только знакомятся с продукцией компании Trinamic.
.jpg)
Рис. 1. Фирменные технологии TRINAMIC рассматривают двигатель как датчик
Шаговые двигатели наравне с бесколлекторными двигателями являются основой современных подвижных механизмов, начиная от игрушек и заканчивая медицинским и промышленным оборудованием. При этом шаговые двигатели оказываются проще в обращении и управлении, что делает их чрезвычайно привлекательными для широкого круга пользователей.
Для построения сложных прецизионных систем, таких как, например, станки с числовым программным управлением (ЧПУ), необходимо обеспечить максимальную точность позиционирования и плавность движения. Для этого потребуется не только создать силовую схему, но и как следует потрудиться с программными алгоритмами. К счастью, появляются интегральные микросхемы, в которых встроены все необходимые компоненты – от микроконтроллера и системы питания до силового каскада и программных функций. Примером таких решения являются драйверы и контроллеры шаговых двигателей от Trinamic.
Если рассмотреть номенклатуру продукции Trinamic, то окажется, что для каждой из микросхем производитель указывает не только базовые характеристики, понятные даже начинающему электронщику (рабочее напряжение, ток, число шагов, корпус и т. д.), но и перечень поддерживаемых фирменных технологий: stallGuard2™, coolStep™, spreadCycle, stealthChop™, dcStep™, microPlyer™, sensOstep™. Что это за технологии? Зачем они нужны? Если для опытных разработчиков, давно работающих с драйверами Trinamic, ответы на эти вопросы очевидны, то у новых пользователей могут возникнуть трудности. В данном цикле статей мы последовательно разберем каждую из перечисленных технологий и попробуем помочь разработчикам, которые только знакомятся с продукцией компании Trinamic.
.png)
Рис. 2. Микросхемы драйверов шаговых двигателей от TRINAMIC
.png)
Рис. 3. Микросхемы контроллеров шаговых двигателей от TRINAMIC
Системы управления шаговыми двигателями с замкнутым контуром обратной связи нуждаются в датчиках положения, что значительно усложняет и удорожает схему привода. Системы с разомкнутым контуром обратной связи не используют датчиков положения. С одной стороны они оказываются дешевыми, а с другой стороны им недостает точности, следовательно, их нельзя применять в прецизионных приложениях. Системы управления, использующие фирменные технологии TRINAMIC, занимают промежуточное положение между замкнутыми и разомкнутыми системами, так как используют только один датчик – сам двигатель.
«Электродвигатель – это датчик!» – девиз, который помещен на странице веб-сайта TRINAMIC. И это не просто слова, так как контроллеры и драйверы от TRINAMIC действительно получают всю информацию о параметрах вращения из сигналов обратной ЭДС и токов обмоток. Полученные данные позволяют добиться прецизионного управления мотором. В настоящий момент TRINAMIC предлагает шесть базовых технологий:
- stallGuard2™ – основополагающая технология, позволяющая оценивать момент на валу двигателя по обратной ЭДС и токам обмоток;
- coolStep™ – вторая по важности технология, позволяющая оптимизировать ток обмоток с учетом прикладываемой нагрузки;
- spreadCycle™ – технология, позволяющая обеспечивать прецизионное плавное движение двигателя;
- stealthChop™ – технология, обеспечивающая беспрецедентное снижение шума до уровня характерного для обычных двигателей постоянного тока;
- dcStep™ – технология, гарантирующая защиту от пропуска шагов и от потери положения вала двигателя;
- microPlyer™ – технология разбиения шагов управления на 16 дополнительных микрошагов с автоматической подстройкой длительности.
В данной статье мы рассмотрим две основополагающие технологии stallGuard2™ и coolStep™. Начнем с базовой технологии stallGuard2™, которую используют практически все остальные.
stallGuard2™ – технология, позволяющая измерять нагрузку на валу двигателя. На самом деле название этой технологии весьма говорящее. Применительно к двигателям слово «stall» в переводе с английского означает «останавливаться», а сама stallGuard первоначально разрабатывалась как программная альтернатива концевым датчикам. Когда подвижный механизм упирается в препятствие, нагрузка двигателя возрастает, что и обнаруживает stallGuard. Однако сейчас данная технология шагнула далеко вперед и позволяет использовать получаемые измерения в качестве сигналов обратной связи для прецизионного управления движением. Рассмотрим принцип работы stallGuard.
Схема измерения определяет электрическую энергию, подаваемую в двигатель (EI) и энергию, которая возвращается в источник питания (EB) (рис. 4). Разница между этими показателями определяет энергию, которая была передана механической системе (EM). stallGuard2 контролирует значение EB, и, если оно приближается к нулю, это значит, что вся энергия передается в систему и подвижный механизм, скорее всего, уперся в препятствие.
.png)
Рис. 4. Принцип измерения нагрузки двигателя в технологии StallGuard2 от TRINAMIC
Любой электродвигатель имеет потери, поэтому часть энергии рассеивается в виде тепла ET (рис. 5). Кроме того, в разных приложениях используются разные двигатели, которые отличаются по параметрам и работают при разных условиях с различной нагрузкой. Чтобы учесть эти особенности, вводится коэффициент ограничения SGT.
.png)
Рис. 5. Настройка параметров StallGuard2
Коэффициента SGT определяет максимальный допустимый момент на валу в данном конкретном приложении (рис. 6). Если момент превышает это значение, можно считать, что двигатель остановился. После того, как значение SGT задано, StallGuard2 пересчитывает величину ST таким образом, чтобы при максимально допустимом моменте его значение было равно нулю. Обычно SGT выбирают с некоторым запасом с учетом калибровки.
.png)
Рис. 6. Оценка показаний StallGuard2
Калибровку системы управления проводят при работе двигателя без нагрузки (рис. 7). Подробно рассматривать механизм калибровки мы не станем, скажем лишь, что ее следует выполнять в среднем диапазоне частот, что связано с особенностями измерения обратной ЭДС двигателя. Дело в том, что при низких частотах значение обратной ЭДС двигателя оказывается слишком мало и работа StallGuard2 затруднена. При больших частотах также возникают проблемы. Поэтому эффективная работа StallGuard2 возможна только в среднем диапазоне частот.
.png)
Рис. 7. Особенности настройки параметров StallGuard2
coolStep™– еще одна базовая технология от Trinamic. Она позволяет управлять током питания обмоток с учетом прикладываемой нагрузки.
Если не углубляться в тонкости, то принцип работы coolStep достаточно прост. Микросхема драйвера с помощью StallGuard2 определяет нагрузку на двигателе и ток в обмотках, а coolStep использует эти данные для подстройки тока (рис. 8). Если нагрузка растет, ток увеличивается. И наоборот, если нагрузка падает, то ток уменьшается вслед за ней.
.png)
Рис. 8. Принцип работы технологии coolStepот TRINAMIC
Использование coolStep дает следующие преимущества:
- Повышение КПД до 75%;
- Минимизация перегрева двигателя;
- Возможность отказа от принудительного охлаждения двигателя;
- Возможность использования менее мощных и менее дорогих двигателей.
coolStep поддерживает оптимальное значение тока, что позволяет снизить потери, и, как следствие, значительно повысить КПД системы. В примере, представленном на рис. 9, на частотах выше 60 об/мин использование coolStep приводит к росту КПД на 20%. Здесь стоит отметить, что, так как данная технология использует данные от StallGuard2, она также эффективно работает только на средних частотах.
.png)
Рис. 9. Повышение КПД при использовании coolStepTRINAMIC
Технология coolStep позволяет значительно снизить избыточное тепловыделение, что становится важным преимуществом при создании лабораторного медицинского оборудования, в котором требуется поддержание высокой стабильности температуры.
Стоит отметить, что технологии StallGuard2 и coolStep являются базовыми для остальных интеллектуальных технологий от TRINAMIC, о которых будет рассказано в следующей статье.
Характеристики микросхемы драйвера шагового двигателя TMC2130-LA:
- Интерфейс управления: Step/ Dir;
- Диапазон питающих напряжений: 4,75…46 В;
- Постоянный выходной ток (среднеквадратичный): 1,2 А;
- Пиковый выходной ток: 2,5 А;
- Коммуникационный интерфейс: SPI;
- Поддерживаемые фирменные технологии: stallGuard2™, coolStep™, stealthChop™, spreadCycle™, dcStep™, microPlyer™;
- Диапазон температур кристалла: -40…125°C;
- Корпусное исполнение: 5×6 мм QFN36.