НТЦ Электропривода Вектор
НТЦ Электропривода «Вектор»
- Главная
- Контакты
- Новости
ВЕКТОРНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДАМИ ПЕРЕМЕННОГО ТОКА (книга)
Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Ивановский государственный энергетический
университет имени В. И. Ленина»
ВЕКТОРНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДАМИ ПЕРЕМЕННОГО ТОКА
УДК 62-83:621.3.07
В48
Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина».¾ Иваново, 2008.¾ 298 с. ISBN
Рассмотрены математические основы, структуры, алгоритмы и современные средства управления электроприводами переменного тока: асинхронными, синхронными, вентильно-индукторными. Основное внимание уделено векторным подходам к управлению электроприводами, в основу которых положен метод векторного представления переменных в пространстве состояний. С использованием понятия результирующего вектора и координатных преобразований рассмотрены различные варианты математического описания электродвигателей переменного тока: асинхронных, синхронных, индукторных, в том числе с учетом эффекта насыщения элементов магнитной системы, потерь в стали и поверхностного эффекта.
Рассмотрены принципиальные схемы, способы и особенности формирования управляющих сигналов силовых полупроводниковых преобразователей, широко применяемых в электроприводе переменного тока. Уделено внимание управлению матричным преобразователем частоты, а также таким вопросам, как компенсация влияния «неидиальностей» силовых ключей, динамическое моделирование тепловых процессов в IGBT-модулях.
На уровне математических выражений, структурных, функциональных схем и блок-схем алгоритмов работы рассмотрены различные варианты построения систем управления электроприводами переменного тока: асинхронными, синхронными, вентильно-индукторными. Кроме традиционного подхода к векторному управлению с прямой и косвенной ориентацией при цифровой реализации рассмотрены примеры цифрового релейно-векторного управления, цифрового адаптивно-векторного управления с использованием и без использования датчика углового перемещения, прямого управления моментом, пример применения векторной ориентации переменных в асинхронном электроприводе с частотным управлением. Отдельное внимание уделено таким вопросам, как идентификация переменных и параметров двигателей, адаптация параметров системы управления к изменению параметров силовой части привода в процессе его работы, векторному управлению активным IGBT-выпрямителем. Для ряда рассмотренных примеров построения систем управления представлена процедура синтеза регуляторов.
Книга ориентирована на специалистов в области автоматизированного электропривода переменного тока и, в частности, предназначена для студентов специальности 180404 «Электропривод и автоматика промышленных установок и технологических комплексов» и магистрантов направления 180400 высших учебных заведений.
Табл. 14. Ил. 151. Библиогр.: 54 назв.
Печатается по решению редакционно-издательского совета ГОУ ВПО «Ивановский государственный энергетический университет им. В.И. Ленина»
Научный редактор
доктор технических наук, профессор А.Р. Колганов
Рецензенты:
Флоренцев С.Н. (ООО «Русэлпром-электропривод)
Глазунов В.Ф. (ГОУВПО «Ивановский государственный энергетический университет им. В.И. Ленина»)
Векторное управление
Векторное управление является методом управления синхронными и асинхронными двигателями, не только формирующим гармонические токи (напряжения) фаз (скалярное управление), но и обеспечивающим управление магнитным потоком ротора. Первые реализации принципа векторного управления и алгоритмы повышенной точности нуждаются в применении датчиков положения (скорости) ротора.
В общем случае под «векторным управлением» понимается взаимодействие управляющего устройства с так называемым «пространственным вектором», который вращается с частотой поля двигателя.
Содержание
- 1 Причины появления
- 2 Математический аппарат векторного управления
- 3 Варианты режимов работы векторного управления
- 3.1 Точность математической модели электродвигателя
- 3.2 Использование датчика скорости электродвигателя
- 4 Терминологические нюансы
- 5 Ссылки
- 6 Литература
- 7 См. также
Причины появления [ править ]
Основной причиной появления векторного управления является, то что асинхронный двигатель с короткозамкнутым ротором (АДКЗ) — самый массовый и дешёвый в производстве двигатель, надёжный и наименее требовательный в эксплуатации (в конструкции нет механических коллекторов, контактных колец) плохо поддаётся регулированию скорости, поэтому он первоначально применялся для нерегулируемых приводов, либо для приводов с механической регулировкой (с помощью коробки передач); специальные многоскоростные АДКЗ позволяли только ступенчато изменять скорость (от двух до пяти ступеней), но их стоимость была гораздо выше, чем обычных, кроме того, требовалась станция управления для таких двигателей, которая дополнительно сильно удорожала систему управления, при этом было невозможно автоматически поддерживать скорость двигателя при изменении нагрузки. Позже были разработаны методы управления скоростью АДКЗ (скалярное управление), но в переходных процессах при скалярном регулировании потокосцепление ротора изменяется (при изменении токов статора и ротора), что приводит к снижению темпа изменения электромагнитного момента и ухудшению характеристик в динамике.
С другой стороны двигатель постоянного тока (ДПТ) при большей его стоимости и эксплуатационных затратах и меньшей надёжности (имеется механический коллектор) просто поддаётся управлению, при этом регулировка может осуществляться как изменением напряжения на якоре с постоянным номинальным потоком возбуждения (первая зона регулирования) так и изменением напряжения на обмотке возбуждения (ослабление потока возбуждения) с постоянным номинальным напряжением на якоре (вторая зона регулирования). При этом обычно регулирование ведётся сначала в первой зоне , а при необходимости дальнейшего регулирования во второй зоне (с постоянной мощностью).
Идеей векторного управления было создание такой системы управления АДКЗ, в которой, подобно ДПТ можно раздельно управлять моментом и магнитным потоком, при этом поддерживается на постоянном уровне потокосцепление ротора и значит изменение электромагнитного момента будет максимальным.
Математический аппарат векторного управления [ править ]
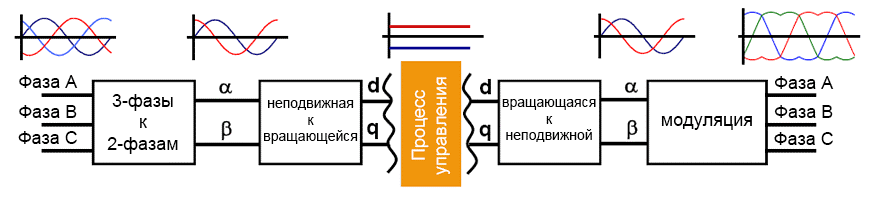
Для СД и АД принцип векторного управления можно сформулировать следующим образом: Первоначально система дифференциальных линейных уравнений трёхфазного двигателя преобразуется в систему уравнений обобщённой двухфазной машины, которая имеет две фазы (расположенные пространственно под 90° относительно друг друга) на статоре и две фазы на роторе, также взаимно расположенных. Затем все вектора, описываемые данной системой проецируются на произвольно вращающуюся ортогональную систему координат, с началом на оси ротора, при этом наибольшая простота уравнений получается при вращении системы координат со скоростью поля машины, кроме того при таком представлении уравнения вырождаются и становятся похожими на уравнения ДПТ, проецирование всех векторов на направление поля машины отражается в названии этого метода — «ориентирование по полю». Фактически вторым этапом формирования величин, ориентированных по полю — это замена обмоток двухфазной обобщённой машины (две на статоре и две на роторе) одной парой взаимно перпендикулярных обмоток, вращающихся синхронно с полем. Кроме характеристик, близких к характеристикам ДПТ, АДКЗ с ориентированием по полю имеет предельно допустимое быстродействие при управлении моментом в режиме поддержания постоянства потокосцепления.
Уравнения электромагнитых процессов, записанные относительно токов статора и потокосцеплений ротора в синхронной ортогональной системе координат, ориентированной по вектору потокосцепления ротора имеют вид:

 — коэффициент рассеяния;
— коэффициент рассеяния;  — соответственно индуктивности статора, ротора и взаимная;
— соответственно индуктивности статора, ротора и взаимная;  — соответственно активные сопротивления статора и ротора;
— соответственно активные сопротивления статора и ротора;  — потокосцепление ротора;
— потокосцепление ротора;  — частота вращения вектора потокоцепления ротора;
— частота вращения вектора потокоцепления ротора;  — электрическая частота вращения ротора;
— электрическая частота вращения ротора;  — проекции токов на оси d и q;
— проекции токов на оси d и q;  — постоянная времени роторной цепи.
— постоянная времени роторной цепи.
При этом могут быть два варианта метода:
- ориентирование по полю ротора
- ориентирование по полю главного потокосцепления
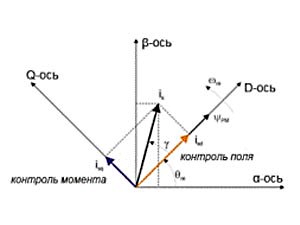
При практической реализации первого метода необходимо определить направление и угловое положение вектора потокосцепления ротора двигателя. Ортогональные оси d, q (в отечественной литературе для асинхронных машин применяют оси x, y) направляют так, что ось d совпадает с направлением вектора потокосцепления ротора. Вектор напряжения статора двигателя регулируют в осях d, q. Составляющая напряжения по оси d регулирует величину тока статора по оси d.
Изменяя ток статора по оси d следует добиваться требуемого значения амплитуды вектора потокосцепления ротора. Ток статора по оси q, контролируемый напряжением по этой оси, определит момент развиваемый двигателем. В таком режиме работы характеристики СД и АД подобны двигателю постоянного тока, так по оси d формируется поле машины (обмотка возбуждения для двигателя постоянного тока, то есть индуктор), а ток по оси q задаёт момент (якорная обмотка двигателя постоянного тока). Управление двигателем по данному методу теоретически обеспечивает большую перегрузочную способность АДКЗ, но при этом невозможно напрямую определить вектор потокосцепления ротора.
Данный метод векторного управления был первоначально реализован в системе «Transvektor» фирмы «Сименс».
Устройства с управлением по вектору главного потокосцепления двигателя, в нашей стране стали именоваться векторными системами. При использовании устройства управления по вектору главного потокосцепления и стабилизации модуля главного потокосцепления двигателя во всех режимах работы исключается чрезмерное насыщение магнитной системы, упрощается структура управления АД. Для составляющих вектора главного потокосцепления (по осям α, β статора) возможно прямое измерение, например, с помощью датчиков Холла, устанавливаемых в воздушном зазоре двигателя.
Питание АД и СД в режиме векторного управления осуществляется от инвертора, который может обеспечить в любой момент времени требуемые амплитуду и угловое положение вектора напряжения (или тока) статора. Измерение амплитуды и положение вектора потокосцепления ротора производится с помощью наблюдателя (математический аппарат позволяющий восстанавливать неизмеряемые параметры системы).
Варианты режимов работы векторного управления [ править ]
Векторное управление подразумевает наличие в звене управления математической модели (далее — ММ) регулируемого электродвигателя. В зависимости от условий эксплуатации электропривода возможно управление электродвигателем как в режимах с обычной точностью, так и в режимах с повышенной точностью отработки задания на скорость или момент.
Точность математической модели электродвигателя [ править ]
В связи с вышесказанным представляется возможным произвести классификационное разделение режимов управления по точности ММ электродвигателя, используемой в звене управления:
- использование ММ без дополнительных уточняющих измерений устройством управления параметров электродвигателя (используются лишь типовые данные двигателя, введенные пользователем)
- использование ММ с дополнительными уточняющими измерениями устройством управления параметров электродвигателя (то есть активных и реактивных сопротивлений статора/ротора, напряжения и токадвигателя)
Использование датчика скорости электродвигателя [ править ]
В зависимости от наличия или отсутствия датчика обратной связи по скорости (датчика скорости) векторное управление можно разделить на:
- управление двигателем без датчика скорости — при этом устройством управления используются данные ММ двигателя и значения, полученные при измерении токастатора и/или ротора
- управление двигателем с датчиком скорости — при этом устройством используются не только значения, полученные при измерении токастатора и/или ротораэлектродвигателя (как в предыдущем случае), но и данные о скорости (положении) ротора от датчика, что в некоторых задачах управления позволяет повысить точности отработки электроприводом задания скорости (положения).
Терминологические нюансы [ править ]
Поскольку принцип векторного управления был изобретен в ФРГ, то в русскоязычной литературе нередко встречается термин «векторное регулирование», являющийся калькой с немецкого «Vektorregierung». Такое определение нельзя считать ошибочным, однако по установившемся нормам русского технического языка более правильным будет использование именно термина «векторное управление». Кроме того часто данный метод называют также «принципом ориентирования по полю», что также является буквальным переводом с немецкого «Prinzip Feldorientir».
Векторное управление
Правильно выбранный способ управления электроприводами переменного тока значительно снижает потребление электроэнергии, повышает к.п.д. и дает ощутимый технический и экономический эффект.
Синхронные и асинхронные машины управляются по 2 основным законам: скалярным и векторным. Суть последнего способа – контроль амплитуды и частоты питающего напряжения как при скалярном управлении, а также фазы. То есть, регулируется не только скалярная величина контролируемых характеристик, но и их векторная составляющая.
Векторный способ позволяет изменять скорость вала и момент одновременно, значительно увеличивает точность регулирования во всем диапазоне, уменьшает потери на намагничивание и нагрев, обеспечивает плавное вращения ротора без рывков на небольших скоростях. Метод также позволяет подстраивать момент на валу при переменной нагрузке без изменения частоты вращения.
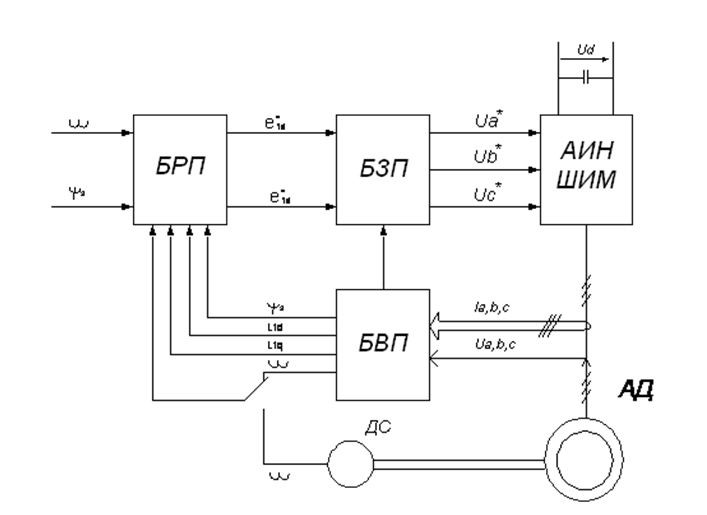
На схеме представлена типовая схема векторного управления электроприводом, где:
- АД – электрический двигатель.
- БРП – блок регуляторов суммирования входных сигналов и сигналов обратной связи.
- БВП – блок вычисления и преобразования импульсов обратной связи.
- БЗП – задающий блок.
- ДС – датчик скорости вала электродвигателя.
- АИН ШИМ – блок амплитудно-импульсной или широтно-импульсной модуляции частоты питающего напряжения.
Принцип ее работы основан на контроле сцепления магнитных потоков ротора и статора. На блок регуляторов БРП и поступают заданные сигналы момента и потокосцепления и импульсы с контура обратной связи. Далее в задающем блоке БЗП они преобразуются в импульсы, регулирующие работу ШИМ или АИМ. На обмотки электродвигателя поступает напряжение заданной частоты и величины. Датчик скорости ДС считает количество оборотов вала ротора в единицу времени и подает сигнал на блок регуляторов БРП. В нем осуществляется суммирование фазовых составляющих заданных сигналов и импульсов обратной связи. В результате на задающий блок БЗП поступает интегрированный сигнал с учетом фактической скорости и момента на валу электродвигателя.
Классификация методов векторного управления
Со времен появления первых управляемых электроприводов переменного тока было предложено много способов регулирования скорости ротора и момента на валу. Наиболее массовое применение нашли методы линейного и нелинейного регулирования.
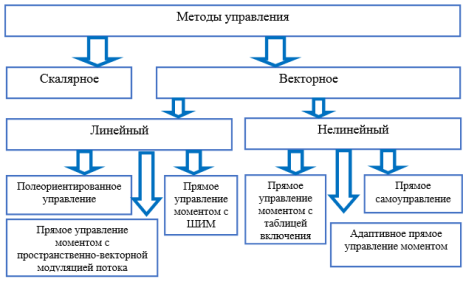
Первый способ применяют в схемах с широтно-имульсной модуляцией. При этом вектор напряжения обмоток статора определяется как усредненное значение за период дискретизации. При линейном регулировании используется пространственно векторная модуляция, регулятор (ПИ) работает с усредненными величинами за период дискретизации сигналов, в то время как нелинейный метод подразумевает обработку мгновенных величин сигналов.
К линейному способу регулирования относятся:
- Полеориентированное управление или ПОУ (англ. FOC ).
- Прямое управление моментом с пространственно-векторной модуляцией напряжения или ПУМ-ПВМ (англ. DTC-SVM ).
- Прямое управление моментом с пространственно векторной модуляцией потока или ПУМ-ПВМП (англ. DTC-FVM).
Обработка средних значений позволяет снизать частоту выборки в линейных схемах до 2-5 кГц. При применении нелинейного метода эта величина составляет до 40 кГц. К таким способам относят:
- Прямое управление моментом с таблицей включения или ПУМ.
- Прямое самоуправление ПСУ.
- Адаптивное прямое управление моментом.
Нелинейное управление позволяет упростить схему, не требует установки датчика положения. Такой способ также отличает отсутствие необходимости выполнять преобразование Парка, отдельную модуляцию напряжения, вводить в топологию контуры тока. Приводы с нелинейным управлением обладают отличными динамическими характеристиками.
К недостаткам метода относят наличие широкоспекторных шумов, значительных пульсаций момента и тока, обусловленных переменной частотой переключения ключей, высокие требования к точности определения вектора магнитного потокосцепления статора и момента.
Полеориентированное управление (ПОУ, FOC )
Полеориентированное управление – метод раздельного контроля магнитного поля и момента. Такой способ применяют в схемах привода с асинхронными двигателями с короткозамкнутым ротором (АДКР) и синхронными электрическими машинами на постоянных магнатах (СДПМ). Метод аналогичен управлению электродвигателями постоянного тока с независимым возбуждением и механической коммутацией.
Главная особенность таких машин – разделенные обмотки возбуждения и якоря. Потокосцепление регулируется током возбуждения статора, изменение момента осуществляется регулировкой тока вращающейся части.
Бесщеточные электрические машины с короткозамкнутым ротором и постоянными магнитами имеют 3-фазные обмотки неподвижной части, потокосцепление и момент зависят от величины и фазы тока статора. Токи возбуждения и ротора объединены. Таким образом, их величины и фазы нельзя изменять независимо друг от друга.
Ток в таких двигателях можно разложить на 2 составляющие: продольную Isd и поперечную Isq. От амплитуды и фазы Isd зависит поле, от значений Isq зависит момент на валу.
В такой системе управление двигателем переменного тока аналогично управлению электрической машиной с независимым возбуждением. Регулирование может быть осуществлено инвертором с широтно-импульсным модулятором, пропорционально-интегральным регулятором и пространственно-векторной модуляцией напряжения.
При этом мгновенные значения тока неподвижной части преобразовываются при помощи преобразования Парка для адаптации к системе координат вращения ротора с учетом сигналов датчика положения вращающейся части. Поле изменяется путем регулирования продольной компоненты Isd, момент – регулировкой поперечной составляющей Isq.
Для определения векторов опорных напряжений в схеме применяется вычислительный блок, осуществляющий обратное преобразование Парка.
Для получения данных о положении вала используется датчик, интегрированный в двигатель. Также возможно полеориентированное управление по косвенным данным. В этом случае положение ротора вычисляется на основании сигналов со счетчика оборотов или измерений других параметров.
Прямое управление моментом с пространственно-векторной модуляцией напряжения
Общая схема прямого управления с ПВМН (пространственно-векторной модуляцией напряжения) представлены на рисунке.
![]()
![]()
Схемы реализованы по подчиненному принципу, то есть внешний контур регулирует момент, внутренний – потокосцепление статора. Вектор управляющего напряжения uz формируется через векторы потокосцепления ψ и момента М, то есть, он состоит из опорных составляющих напряжения статора.
С выхода регулятора момента подается команда на изменения угла положения ротора, частоты его вращения. В таких схемах момент и потокосцепление регулируются в замкнутых контурах напрямую, что предполагает точное определение пространственных величин потока и момента. Схема с пространственно-векторной модуляцией напряжения работает на постоянной частоте переключений. Это позволяет осуществлять пуск двигателя на низкой скорости, снижает пульсации потока и момента. К недостаткам относятся некоторое ухудшение динамических характеристик.
Нелинейные регуляторы момента
Вторая группа методов векторного управления – нелинейные. В отличие от полеориентированного управления, где используется регулирование по аналогии с коллекторными электрическими машинами постоянного тока с независимым возбуждением, нелинейный способ предлагает непрерывное управление по аналогии с полупроводниковыми устройствами и инверторами.
Прямое управление моментом
Схема прямого управления моментом с таблицей включений была разработана в 1984 году. Суть метода – задание вектора напряжения для одновременного регулирования момента и сцепления магнитных потоков.
Реализация такого способа управления значительно проще схем, ориентированных по полю. При этом отпадает необходимость определять положение вала и преобразовывать неподвижную систем координат во вращающуюся и обратно.
Один из вариантов схем прямого управления моментом с таблицей ограничения включений представлен на рисунке.
Управление осуществляется по двум каналам: частоты вращения, потокосцепления.
На входе есть задатчик интенсивности (ЗИ), который обеспечивает ограничение ускорения при изменении скорости. Это необходимо для снижения тока на инверторе напряжения (АИН). При ускорении ограничитель ЗИ уменьшает значение тока инвертора АИН. При снижении частоты вращения – рассеивание избыточной мощности или ее возврат в сеть. Как и в системе с пространственной модуляцией для уменьшения перерегулирования на выходе ЗИ нужен апериодический фильтр (Ф). Пропорционально-интегральный регулятор скорости (РС) дает команду на задание момента, который ограничивается нелинейным звеном насыщения.
Определение потокосцеплений статора и ротора осуществляется в блоке НП (адаптивный наблюдатель). В него поступают сигналы о текущих значениях токов и напряжении статора, которые преобразуются в проекции.
Идентификатор напряжения (ИН) служит для определения фазы напряжения статора по состоянию ключей инвертора и его выходному напряжению. На основании полученных пространственные значений вычисляются координаты векторов, а также величины момента и скорости вращения.
Сигналы задания момента и потокосцепления сравниваются с фактическими текущими значениями. Регуляторы РМ и РП с непрерывными характеристиками определяют величину ошибки и формируют сигнал, поступающий на селективный блок вектора напряжения (СВН), с которого управляются ключи инвертора.
Схема прямого управления моментом с таблицей отключений обеспечивает динамическое изменение момента на малых скоростях, включая нулевую угловую частоту, допустимое отклонение скорости не более 10% без датчика и около 0,01% с датчиком, скорость отработки задания момента не более 2 мс.
Прямое самоуправление моментом
Метод самоуправления отличают хорошие динамические характеристики во всех значениях вектора магнитного поля, относительно невысокая частота переключения ключей инвертора, несинусоидальная форма потокосцепления и тока обмотки неподвижной части двигателя, шестиугольная траектория движения вектора потокосцепления.
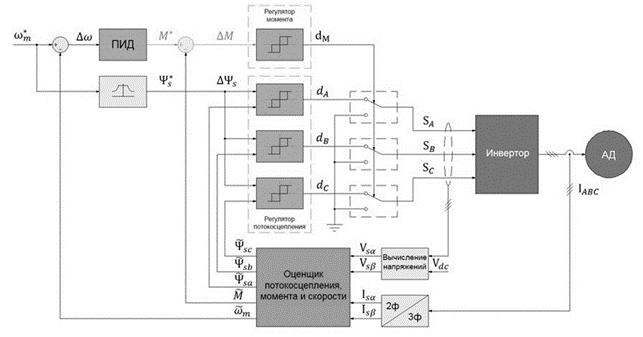
Регулятор потокосцепления выдает сигналы dA, dB и dC на основании заданного значения потокосцепления статора ψs и текущих фазовых компонентов ψsA, ψsB и ψsC. Сигналы с регулятора соответствуют напряжениям, подаваемым на инвертор.
Сигнал с регулятора момента dM определяет нулевое состояние напряжения, регулятор потокосцепления – длительность активных состояний.
| Метод управления | Диапазон управления скоростью | Время нарастания момента | Пусковой момент | Стоимость | Погрешность регулирования скорости | Описание |
| Скалярный | 1:10 | Не регулируется | Невысокий | Небольшая | От 5 до 10% | Прост в исполнении, имеет узкий интервал регулирования скорости, значительное время отклика |
| Векторное полеорентированное | Более 1: 400 | 1-2 мс | Высокий | Высокая | Позволяет плавно регулировать момент и частоту вращения вала. Необходимо определение положения ротора | |
| Векторное с пространственно-векторной модуляцией напряжения; | Более 1: 400 | 1-2 мс | Высокий | Высокая | Сочетает достоинства полеориентированного и прямого управления | |
| Прямое с таблицей выключения | Более 1: 400 | Менее 1 мс | Высокий | Высокая | Обладает отличными динамическими параметрами. Недостаток: значительные пульсации момента и тока | |
| Прямое самоуправление | Более 1: 400 | 1-2 мс | Высокий | Высокая | Снижает потери при управлении приводом значительной мощности |
Заключение
Каждый метод управления электроприводом переменного тока имеет свои достоинства и недостатки. Способ выбирают, исходя из технических требований к оборудованию, а также экономических критериев.
Векторное управление
Векторное управление является методом управления синхронными и асинхронными двигателями, не только формирующим гармонические токи (напряжения) фаз (скалярное управление), но и обеспечивающим управление магнитным потоком ротора. Первые реализации принципа векторного управления и алгоритмы повышенной точности нуждаются в применении датчиков положения (скорости) ротора.
В общем случае под «векторным управлением» понимается взаимодействие управляющего устройства с так называемым «пространственным вектором», который вращается с частотой поля двигателя.


Содержание
Математический аппарат векторного управления
Для СД и АД принцип векторного управления можно сформулировать следующим образом:
Необходимо определить направление и угловое положение вектора потокосцепления ротора двигателя. Ортогональные оси d,q (в отечественной литературе для асинхронных машин применяют оси x,y) направляют так, что ось d совпадает с направлением вектора потокосцепления ротора. Вектор напряжения статора двигателя регулируют в осях d,q. Составляющая напряжения по оси d регулирует величину тока статора по оси d.
Изменяя ток статора по оси d следует добиваться требуемого значения амплитуды вектора потокосцепления ротора. Ток статора по оси q, контролируемый напряжением по этой оси, определит момент развиваемый двигателем. В таком режиме работы СД и АД подобны двигателю постоянного тока, так по оси d формируется поле машины (обмотка возбуждения для двигателя постоянного тока, т.е. индуктор), а ток по оси q задаёт момент (якорная обмотка двигателя постоянного тока).
Векторное управление может быть реализовано не только при определении направления и углового положения вектора потокосцепления ротора (система «Transvektor»). Практический интерес представляют аналогичные устройства с управлением по вектору главного потокосцепления двигателя, которые в нашей стране стали именоваться векторными системами. Указанные устройства управления имеют свои особенности. Применение вектора потокосцепления ротора теоретически обеспечивает большую перегрузочную способность АД. При использовании устройства управления по вектору главного потокосцепления и стабилизации модуля главного потокосцепления двигателя во всех режимах работы исключается чрезмерное насыщение магнитной системы, упрощается структура управления АД. Для составляющих вектора главного потокосцепления (по осям α, β статора) возможно прямое измерение, например, с помощью датчиков Холла, устанавливаемых в воздушном зазоре двигателя.
Питание АД и СД в режиме векторного управления осуществляется от инвертора, который может обеспечить в любой момент времени требуемые амплитуду и угловое положение вектора напряжения (или тока) статора. Измерение амплитуды и положение вектора потокосцепления ротора производится с помощью наблюдателя (математический аппарат позволяющий восстанавливать неизмеряемые параметры системы).
Для векторного управления асинхронным двигателем следует сначала привести его к упрощенной двухполюсной машине, которая имеет две обмотки на статоре и роторе, в соответствии с этим имеется системы координат связанные со статором, ротором и полем.
Варианты режимов работы векторного управления
Векторное управление подразумевает наличие в звене управления математической модели (далее — ММ) регулируемого электродвигателя. В зависимости от условий эксплуатации электропривода возможно управление электродвигателем как в режимах с обычной точностью, так и в режимах с повышенной точностью отработки задания на скорость или момент.
Точность математической модели электродвигателя
В связи с вышесказанным представляется возможным произвести классификационное разделение режимов управления по точности ММ электродвигателя, используемой в звене управления:
- использование ММ без дополнительных уточняющих измерений устройством управления параметров электродвигателя (используются лишь типовые данные двигателя, введенные пользователем)
- использование ММ с дополнительными уточняющими измерениями устройством управления параметров электродвигателя (т.е. активных и реактивных сопротивлений статора/ротора, напряжения и токадвигателя)
Использование датчика скорости электродвигателя
В зависимости от наличия или отсутствия датчика обратной связи по скорости (датчика скорости) векторное управление можно разделить на:
- управление двигателем без датчика скорости — при этом устройством управления используются данные ММ двигателя и значения, полученные при измерении токастатора и/или ротора
- управление двигателем с датчиком скорости — при этом устройством используются не только значения, полученные при измерении токастатора и/или ротораэлектродвигателя (как в предыдущем случае), но и данные о скорости (положении) ротора от датчика , что в некоторых задачах управления позволяет повысить точности отработки электроприводом задания скорости (положения).
Терминологические нюансы
Поскольку принцип векторного управления был изобретен в ФРГ, то в русскоязычной литературе нередко встречается термин «векторное регулирование«, являющийся калькой с немецкого «Vektorregelung». Такое определение нельзя считать ошибочным, однако по установившемся нормам русского технического языка более правильным будет использование именно термина «векторное управление«.