
Вертолет без двигателя как называется
Об учреждении
Техника/средства авиационной охраны лесов
Вертолет Ми-8Т
 Вертолет МИ-8 является многоцелевым вертолетом и выпускается в пассажирском, транспортном вариантах.
Вертолет МИ-8 является многоцелевым вертолетом и выпускается в пассажирском, транспортном вариантах.
Транспортный вариант вертолета МИ-8 имеет грузовую кабину объемом около 23 м’ с большим грузовым люком, усиленным полом, узлами швартовки грузов и т.п. Кабина оборудована грузовыми створками и трапами и, кроме того, имеет сдвижную дверь по левому борту, а вдоль бортов установлены 24 откидных сиденья.
Летно-технические характеристики
Максимальная скорость, км/час
с нормальным взлетным весом 250
с максимальным взлетным весом 230
Крейсерская скорость с нормальным взлетным весом, км/час 225
Максимальная высота полета, м 4700
Дальность полета в транспортном варианте (резерв топлива составляет 5% от полной
с нормальным взлетным весом 465
с максимальным взлетным весом 445
Дальность полета с 28 пассажирами (резерв топлива на 20 минут полета), км 500
Базовый вес пустого вертолета, кг:
в транспортном варианте 6624
в пассажирском варианте 6799
Силовая установка: два турбовинтовых двигателя ТВ2-117А
Мощность одного двигателя, з.л.с.
Расход авиатоплива, т/час 0,680
Вертолет R-44
Robinson R44 — лёгкий коммерческий вертолёт. R44 многоцелевой, четырёхместный вертолет производства компании «Robinson Helicopter», США. На вертолёт Robinson R44 ставятся 2 типа двигателя: карбюраторный и инжекторный. Вертолёт с металлическими шасси, для посадки вертолета на твердый грунт называется Robinson R44 Raven, с поплавками вертолёта для посадки на воду — Robinson R44 Clipper.
Летно-технические характеристики вертолета:
Вес:
полный взлетный вес 1 089 кг
полезная нагрузка до 380 кг
стандартное количество топлива 185 л
Силовая установка:
Модель Lycoming O-540
Мощность 260 л.с.
Летные данные:
Максимальная скорость 240 км/ч
Крейсерская скорость 210 км/ч
Максимальная дальность полета 680 км
Максимальная продолжительность полета 3,5 часа
Расход топлива 50 л/ч
Скороподъемность 5 м/сек
Рабочая высота 4 250 м
Экипаж 1+3
Самолет АН-2Т (АН-2ТП)
 Он может быть использован для следующих целей:
Он может быть использован для следующих целей:
— перевозки пассажиров;
— транспорта грузов;
— обучения парашютистов;
— перевозки больных на носилках.
Оснащен необходимым оборудованием: это — сидения для пассажиров, замки и тросы для закрепления груза, десантные тросы, световая и звуковая сигнализация для сбрасывания десанта, ручки для крепления санитарных носилок и термоизоляционные стенки.
Летно-технические характеристики
Максимальная коммерческая загрузка, кг 1500
Количество перевозимых пассажиров 12
Крейсерская скорость, км/час 180
Дальность полета, км:
при максимальном запасе топлива 1025
при максимальной загрузке 300
Расход авиатоплива (авиабензин), кг/час 140
Потребная длина взлетно-посадочной полосы,м:
Грунтовой 650
с искусственным покрытием 400
Самолет М-12 «Касатик»
Легкий многоцелевой трехместный двухмоторный цельнометаллический самолет M-12 «Касатик» может широко применяться для инспекции и экологического контроля в лесном, охотничьем и рыбном хозяйстве, аэрофотосъемки местности, патрулирования железных и автомобильных дорог, нефте — и газопроводов, учебно-тренировочных полетов, авиаспорта и туризма, ведения сельскохозяйственных работ и перевозки малогабаритных грузов и т.д.
Самолет М-12 «Касатик» легок в полет, имееет дублирующее управление, позволяющее без труда приобрести навыки пилота. Его можно поднять и посадить практически на любой площадке. Не требующей специальной подготовки взлетно-посадочной полосы, имея запас топлива, позволяющий совершать беспосадочные перелеты на расстояние до тысячи километров, этот самолет может с успехом использоваться в деловых целях.
Летно-технические характеристики
Взлетная масса, кг 855
Масса пустого, кг 485
Масса полезной нагрузки 280
Мощность СУ, л.с 2х79
Применяемое топливо Аи.93, Аи.95
Скорость максимальная, км/ч 230
Скорость крейсерская, км/ч 180
Скороподъемность, м/с 8
Дальность полета с максимальной нагрузкой, км 960
Авторотация
Авторота́ция (др.-греч. αὐτός — сам; лат. rotatio — вращение) — режим вращения воздушного винта летательного аппарата или турбины двигателя, при котором энергия, необходимая для вращения, отбирается от набегающего на винт потока. Термин появился между 1915 и 1920 годами в период начала разработок вертолётов и автожиров и означает вращение несущего винта без участия двигателя.
Содержание
- 1 Описание
- 2 Использование
- 2.1 Зоны лопасти винта вертолёта при авторотации
- 3 Ссылки
- 4 Примечания
Описание [ править | править код ]

На самолётах, использующих в качестве движителя воздушные винты без изменяемого шага, авторотация винта (вращение от набегающего потока) возникает при отказе или выключении двигателя в полёте. При этом возникает сильное сопротивление потоку и, в случае отказа одного двигателя на консоли крыла, — сильный разворачивающий и кренящий момент, что существенно усложняет управление летательным аппаратом и может привести к его падению. Для предотвращения этого неприятного явления все современные турбовинтовые двигатели имеют системы автоматического и ручного флюгирования, в случае остановки двигателя в полёте устанавливающие (поворачивающие) лопасти воздушного винта «по потоку». Винт при этом имеет минимальное лобовое сопротивление и не вращается. Для запуска турбовинтового двигателя в полёте винт выводится из флюгерного положения и начинает раскручивать двигатель; при достижении определённой частоты вращения включается система зажигания и подача топлива — «запуск на авторотации».
Ротор турбореактивных двигателей, в случае их выключения в полёте, также может вращаться от набегающего потока в режиме авторотации.
Для вертолётов в отечественной практике для обозначения авторотации несущего винта установился термин «самовращение несущего винта» (СНВ). При штатном полёте вертолёта, с включённым двигателем, воздушный поток поступает сверху и выходит снизу — несущий винт работает в режиме «пропеллер». В режиме СНВ несущий винт вертолёта раскручивается от встречного набегающего потока, одновременно создавая подъёмную силу. Авторотация возможна потому, что несущий винт оказывается при таком обтекании в режиме «ветряка». Для снижения механических потерь в режиме СНВ между двигателем и несущим винтом установлена обгонная муфта (существуют несколько её конструктивных решений). Например, на вертолёте Ми-8 обгонные муфты установлены между свободной турбиной и главным редуктором, поэтому в режиме СНВ от несущего винта приводятся во вращение главный редуктор, который раздает крутящий момент на хвостовой винт, насосы гидросистем и генератор переменного тока (и некоторые другие агрегаты вертолёта): вертолёт сохраняет управляемость и питание пилотажных приборов кабины.
Используя авторотацию, вертолёт может произвести безопасную посадку при отказе одного или двух двигателей, поэтому возможность безопасной посадки на авторотации является обязательной для прохождения сертификации производителями вертолётов. Аэродинамическое качество в режиме авторотации (на примере вертолёта Ми-4) составляет от 1,55 до 5,0 при скорости полёта от 50 до 120 км/ч соответственно [1] .
Режим авторотации является рабочим для автожира. Поляра вращающегося несущего винта автожира очень похожа на поляру крыла, поэтому полёт на автожире по технике пилотирования больше напоминает полёт на самолёте, чем на вертолёте.
Использование [ править | править код ]
На вертолётах наиболее частая причина использования авторотации — это неисправность двигателя, но авторотация также может использоваться и в случае полного отказа рулевого винта, поскольку при авторотации отсутствует реактивный момент, создаваемый несущим винтом. В некоторых экстремальных ситуациях авторотация может использоваться для выхода из вихревого кольца, если позволяет высота.
На одновинтовых вертолётах при отказе двигателя несущий винт, продолжая двигаться по инерции, какое-то время будет по-прежнему создавать подъёмную силу, теряя обороты. Действия пилота при отказе двигателей в первую очередь зависят от направления вращения несущего винта. Например, при правом вращении несущего винта, в момент отказа двигателей, тангаж вертолёта самопроизвольно увеличивается, с разворотом по рысканию влево. Пилот парирует угол рыскания отклонением педалей (изменением шага хвостового винта), а тангаж — плавной отдачей ручки от себя. Одновременно, пилот должен изменить угол атаки лопасти на противоположный и уменьшить шаг винта до минимально возможного, чтобы не дать винту потерять угловую скорость. Из-за изменения угла атаки винта вертолёт начинает быстро снижаться. Набегающий поток воздуха оказывает сильное воздействие на винт, раскручивая его в том же направлении, в котором он вращался. Направление вращения остается тем же.
Несколько факторов влияют на скорость снижения в режиме авторотации: плотность воздуха, вес вертолёта, частота вращения винта, скорость набегающего потока воздуха. Для контроля скорости снижения пилот в первую очередь контролирует скорость на вариометре. Уменьшение или увеличение скорости регулируется шагом винта, как и при нормальном полёте. Установившаяся скорость вертикального снижения составляет приблизительно 25-30 м/с и зависит от модели вертолёта и факторов, описанных выше. Такая скорость не может быть погашена только за счет инерции несущего винта и при отсутствии достаточной для набора горизонтальной скорости высоты посадка невозможна.
За время снижения несущий винт накапливает большую кинетическую энергию за счёт своей массы и скорости вращения. За несколько метров до земли пилот изменяет угол атаки несущего винта на противоположный (устоялся жаргонизм «подрыв винта»). За счет кинетической энергии вращения несущий винт при «подрыве» создает дополнительную подъёмную силу, при этом частота вращения винта уменьшается. Вертикальная скорость снижается до приемлемых величин (примерно 5-6 м/с), и вертолёт производит посадку. Вид посадки зависит от полётной массы вертолёта: пустой вертолёт может сесть с вертикальным снижением; при наличии груза на борту приходится садиться с пробегом, «по-самолётному».
Для более безопасного приземления вертолёт должен иметь или достаточную высоту или достаточную горизонтальную скорость. Высота необходима для раскрутки несущего винта во время снижения. Горизонтальная скорость используется для быстрого перевода кинетической энергии движения вертолёта в энергию вращения винта. При отказе двигателя на малой высоте приземление может закончиться катастрофой. Военные вертолёты работают на малой высоте, поэтому для спасения экипажа иногда устанавливают катапультируемые кресла и предусматривают отстрел лопастей несущего винта перед катапультированием.

Самая длительная авторотация в истории была выполнена Жаном Буле (фр. Jean Boulet ) в 1972 году, когда он достиг рекордной высоты 12 440 м на вертолёте Aérospatiale Lama. Из-за низкой температуры (−63 °C) на этой высоте двигатель остановился и больше не запустился. Используя авторотацию, пилот смог безопасно посадить вертолёт на землю. [2] .

Зоны лопасти винта вертолёта при авторотации [ править | править код ]
Лопасти винта вертолёта имеют отрицательную крутку (угол атаки комля больше угла атаки конца лопасти), поэтому во время вертикальной авторотации, диск, образуемый вращающимися лопастями вертолёта, можно разделить на три области: ведущую, ведомую и зону отрывного обтекания. Размер этих областей изменяется в зависимости от наклона лопастей, скорости снижения и частоты вращения винта. Когда эти параметры изменяются, изменяется и процентное отношение этих трёх областей.
Ведомая зона располагается на концах лопастей. Обычно составляет около 30 % радиуса. Ведомая зона обеспечивает торможение лопастей и как следствие, снижение частоты вращения винта.
Ведущая зона, или зона авторотации, обычно составляет от 25 до 70 % радиуса винта и является источником движущей силы вращения лопасти при авторотации. Суммарная аэродинамическая сила в этой области направлена немного вперёд относительно оси вращения и вызывает ускорение вращения винта.
Внутренние 25 % лопасти работают на угле атаки больше критического, вызывая замедление вращения винта.
Постоянная скорость вращения винта достигается тогда, когда сила, образуемая ведущей зоной, уравновешивается силами торможения ведомой зоной и зоной отрывного обтекания. Пилот регулирует наклон лопастей, например, увеличивая площадь ведущей зоны, это вызывает ускорение вращения винта и, в свою очередь, увеличение ведомой и закритической зон, поэтому вращение стабилизируется на более высокой частоте. Уменьшение ведущей зоны уменьшает скорость вращения.
Что такое авторотация, или Как посадить вертолет при отказе двигателей
Если во время полета у самолета отказывают двигатели, пилот имеет шанс спланировать и спасти машину и пассажиров. Бытует мнение, что раз у вертолета нет крыльев, то он не может планировать. Неужели отказ двигателя означает гибель винтокрылой машины? Нет, вертолет может совершить посадку в режиме авторотации винта.

Авторотация – вращение несущего винта вертолета с помощью набегающего потока воздуха. Во время авторотации создается подъемная сила, достаточная для планирования, маневрирования и мягкой посадки судна.
Режим авторотации чаще всего используется для аварийной посадки вертолета при отказе двигателя. Также она применяется, когда выходит из строя рулевой винт (или нарушается управление по рысканью), в результате чего продолжать нормальный полет невозможно.
Авторотация – это аварийный режим, который тем не менее необходимо освоить любому пилоту, но только под руководством опытного инструктора. От умения управлять вертолетом в режиме авторотации зависит жизнь экипажа и пассажиров.
Как работает авторотация
Когда несущий винт вертолета раскручивается за счет энергии двигателя, он создает нисходящий воздушный поток и функционирует по принципу пропеллера, который ориентирован в пространстве горизонтально.
Если во время полета перестает работать двигатель, скорость вращения винта начнет падать, а машина ‒ терять скорость и снижаться. В этот момент на лопасти начинает действовать набегающий снизу поток воздуха. Это воздействие, при соблюдении определенных условий, раскручивает несущий винт, который снова создает подъемную силу. В режиме авторотации винт работает как горизонтально ориентированная ветряная мельница.
Чтобы при авторотации кинетическая энергия не тратилась на вращение двигателя, в вертолетах используется обгонная муфта. Это элемент трансмиссии, который блокирует передачу крутящего момента с ведомого вала на ведущий. Обгонные муфты также используются в велосипедах. Благодаря этим устройствам педали не вращаются, когда велосипедист едет с горы по инерции.
Кстати, у гиропланов (автожиров) несущий винт вращается и создает подъемную силу только за счет авторотации. Воздушные суда этого типа похожи на вертолеты внешне, но летают они скорее по принципу самолетов.

Как посадить вертолет в режиме авторотации
Аварийная посадка в режиме авторотации входит в курс подготовки пилотов гражданских вертолетов. Алгоритм действия летчика зависит от типа воздушного судна, высоты и скорости полета, места посадки и других факторов. Схематически его можно описать так:
- Сразу после отказа двигателя пилот должен перейти на режим авторотации. Благодаря наличию муфты холостого хода несущий винт будет вращаться под воздействием набегающего снизу потока воздуха без сцепления с валом двигателя.
- Если после отказа двигателя скорость вращения винта резко снизилась, его необходимо раскрутить. Пилот должен уменьшить общий шаг до минимального. Это раскручивает винт, но уменьшает создаваемую им подъемную силу. Одновременно летчик должен оценить высоту и скорость снижения судна и установить стабилизированный режим снижения с помощью органов управления.
- Если после отказа двигателя винт вращается с высокой скоростью, машина будет снижаться довольно быстро. Это компенсируется увеличением шага, что повышает, однако, сопротивление несущего винта и уменьшает его обороты.
- За несколько метров до земли пилоту необходимо достаточно резко увеличить шаг и компенсировать увеличение угла тангажа вертолета отдачей ручки управления «от себя». Это практически останавливает горизонтальное движение машины, однако и обороты несущего винта при этом резко снижаются. Вертолет относительно плавно опускается на землю. В идеале, спуск получается почти вертикальным или с коротким пробегом.
Легкие вертолеты, например, Robinson R44, в режиме авторотации под управлением опытного пилота могут ненадолго зависать в воздухе. Благодаря этому посадка получается мягкой. Управлять тяжелыми воздушными судами при отказе двигателя сложнее. Поэтому посадить их с помощью авторотации без повреждений удается не всегда, но такие вертолеты всегда снабжены двумя двигателями, что значительно повышает уровень безопасности.
Видео посадки вертолета в режиме авторотации
Двойной рекорд Жана Буле
Французский пилот Жан Буле в 1972 году установил за один полет сразу два рекорда, которые не побиты до настоящего времени. Летчик рассчитывал достичь рекордной высоты на своем Aérospatiale SA.315B Lama. Это ему удалось: машина поднялась на фантастическую высоту ‒ 12 442 метра над уровнем моря.
А вот второй рекорд получился спонтанным. У Жана Буле не оставалось выбора, так как на огромной высоте из-за перегрузок вышел из строя двигатель. Пилот перешел в режим авторотации и посадил машину. Летчик и его машина даже не получили повреждений.
После необычного полета Жан Буле остался в авиации. До выхода на пенсию он работал летчиком-испытателем ВВС Франции.
Авторотация – «штатный внештатный режим»
Режим авторотации позволяет мягко посадить вертолет в случае отказа двигателя. Выход из строя силовой установки – это, без сомнения, крайне опасная аварийная ситуация. В таких условиях у летчиков остается единственный шанс избежать катастрофы, но действовать необходимо быстро. Именно поэтому в программу подготовки пилотов вертолетов входит тренировка посадки в режиме авторотации. Конечно, для гарантированно мягкой посадки в тренировочных полетах за несколько метров до земли двигатель вновь запускают, но навык закрепляется и совершенствуется без малейшего вреда для воздушного судна и его экипажа.
Пилотов готовят к посадке со свободно вращающимся винтом в расчете на то, что они будут действовать в аварийной ситуации так же уверенно и спокойно, как и во время штатного полета. А это повышает безопасность пассажиров и вероятность мягкой посадки.
На земле и в небе: один день в Московском авиационном центре
.jpg)
В управлении Московского авиационного центра (МАЦ) Департамента по делам гражданской обороны, чрезвычайным ситуациям и пожарной безопасности находится 10 вертолетов. Пять из них ежедневно дежурят в Москве: три санитарных и два пожарных. В День работника гражданской авиации, который отмечают 9 февраля, сотрудники МАЦ показали, что они делают каждый день, чтобы подготовить вертолеты к вылету. Оказывается, для бесперебойной работы в небе нужно сначала многое сделать на земле.
Проверка всех систем
В просторном ангаре стоит несколько санитарных вертолетов. Выглядят они не совсем привычно для человека, далекого от авиации. Панели в верхней части корпуса открыты, так что можно видеть внутренности машины. Для сотрудников МАЦ это, напротив, дело обычное, ведь ежедневно каждый вертолет проходит предполетную и послеполетную подготовку. Техники и инженеры осматривают все внешние и внутренние системы машины, в том числе двигатели.
«Гражданская авиация — это не только пилоты, но и авиационно-технический персонал. Мы очень благодарны этим специалистам, потому что, уходя в полет, уверены в исправности нашей техники. Это очень серьезная кропотливая работа, от которой зависит успех каждого полета», — рассказал заместитель командира второй авиационной эскадрильи Вячеслав Каленов.
.jpg)
Отдельно проверяют радиоэлектронное и бортовое оборудование, обеспечивающее питание вертолета, связь и навигацию.
«Мы проверяем индикацию приборов, чтобы она соответствовала действительности, не было ошибок при включении вертолета, а также осматриваем органы управления, предохранители, антенные узлы, разъемы, штекеры, позиционные огни, посадочные фары и так далее. Обязательно заранее связываемся с вышкой, чтобы у пилотов не возникало проблем со связью с землей», — рассказывает инженер по техническому обслуживанию авиационной техники по радиоэлектронному оборудованию Егор Жигорев.
Некоторые приборы настолько чувствительные, что во время стоянки их закрывают специальными чехлами. Например, датчики по бокам от носа вертолета очень чувствительны к давлению воздуха. Они измеряют давление атмосферы и скорость набегающего потока. Если их не зачехлить, туда может попасть мусор или насекомые, из-за чего датчики могут выйти из строя.
«Вообще сбои бывают очень редко. Машины достаточно новые, там все компьютеризировано, все проверяется автоматикой», — добавил Егор Жигорев.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
Прогреть и заправить
Следующий этап подготовки к вылету проходит за пределами ангара — на улице. Зимой вертолеты нужно прогревать. Но просто включить двигатель и подождать пять минут, как это делают автомобилисты, недостаточно. Теплый воздух подают извне. Для этого в Московском авиацентре есть универсальный моторный подогреватель. Это машина с двумя длинными толстыми рукавами. Внутри воздух прогревается до 90 градусов, а пока идет по рукавам — немного охлаждается и в воздушное судно поступает при температуре 60–80 градусов. Прогревают и двигатель, и кабину.
Вторая важнейшая для предполетной подготовки машина — аэродромный передвижной электроагрегат, он же автономный источник питания. Дело в том, что перед полетом необходимо проверить бортовую систему и произвести запуск. Для этого передвижной электроагрегат подает электричество на воздушное судно. Процедуру нужно проводить и зимой, и летом, и перед полетом, и после.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
И конечно, вертолет необходимо заправить. Это похоже на заправку автомобиля: топливо подается через шланг, только объемы совсем другие — бак вмещает более 600 килограммов (именно килограммов, а не литров, уточняют техники). А еще не существует стационарной заправки для вертолетов, к воздушным судам подъезжает бензовоз. Кстати, если вертолеты центра отправляют помогать в другие регионы, заправщик едет вместе с ними.
Вертолеты заправляют после каждого вылета. Расход топлива на час полета составляет около 150 килограммов. Вертолеты всегда держат полностью заправленными, потому что может поступить вызов в любую точку Москвы и области, топлива должно хватить на путь туда и обратно.

Тренировка в небе
Теперь, когда все подготовительные работы выполнены, один из вертолетов демонстрирует свое мастерство. Экипаж Ка-32А поднимет вертолет в воздух, подлетит к массивной железной ферме и с помощью внешней подвески захватит ее и поднимет, а затем перенесет на другое место.
«Вертолет уникален: на него можно подвесить все что хочешь и выполнить любые работы, в том числе потушить пожар, если к нему прикрепить внешнее сливное устройство. Сейчас в качестве тренировочного задания экипаж поднимает и переносит тяжелую ферму. Это очень полезный навык. Дело в том, что, когда происходят какие-то аварии, нужно быстро доставить на место происшествия оборудование, и часто удобнее это сделать с воздуха. Вертолет может доставить трансформаторную будку, насосную станцию и так далее», — рассказывает заместитель командира летного отряда Алексей Диденко.
.jpg)
Около пяти минут Ка-32А стоит на земле с работающими двигателями и винтами. В это время пилоты готовятся, связываются с диспетчером, подтверждают разрешение на полет. Звук от машины очень громкий, сотрудники МАЦ, которые стоят поблизости, надевают шумопоглощающие наушники. Когда вертолет поднимается в воздух, все вокруг сдувает, поэтому нельзя оставлять на земле вещи. Экипаж успешно справляется с тренировочным заданием, ферму в течение 10 минут доставили на нужное место.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
Санитарные вертолеты готовы круглосуточно
С прошлого года санитарные вертолеты дежурят не только днем, но и ночью. Впервые такую практику опробовали на чемпионате мира по футболу, но работа в ночное время оказалась такой востребованной, что ее ввели на постоянной основе.
«В темное время суток мы садимся только на площадки, оборудованные для ночных полетов. Таких площадок у нас сейчас шесть при больницах, на них есть подсветка и все необходимое оборудование. Еще шесть находится в ТиНАО. Кроме того, мы выполняем посадки на МКАД, потому что она хорошо освещена», — пояснил заместитель директора по организации летной работы Олег Катальшев.

Он рассказал, что ночью санитарные вертолеты авиацентра пришли на помощь почти 80 пострадавшим. По его словам, и в дневное, и в ночное время основные причины для вылета — инсульты, инфаркты и ДТП. Среднее время, за которое вертолеты прибывают на место происшествия, — от восьми до 10 минут.
Такая оперативная помощь сильно увеличивает шансы пострадавших на выживание — срабатывает правило золотого часа. Врачи считают, что оказание помощи в течение 60 минут увеличивает вероятность благополучного исхода. Кроме того, первую помощь начинают оказывать уже во время полета, ведь внутри вертолетов есть все необходимое оборудование. По сути, это настоящая воздушная реанимация с капельницей, лекарствами, монитором, дефибрилляторами и диэлектрическим полом.
.jpg)
Итоги работы
В 2018 году экипажи санитарных вертолетов Московского авиационного центра обработали почти 900 заявок Центра экстренной медицинской помощи. Оказали медпомощь и эвакуировали с мест ДТП и других ЧС в лечебные учреждения города более 520 пострадавших. Экипажи пожарных вертолетов привлекались четыре раза и сбросили на пожары более 500 тонн воды. С начала 2019 года экипажи МАЦ эвакуировали с мест ДТП и ЧС более 20 человек.
Автомат перекоса вертолета. Общий принцип управления.
Привет, друзья!

Втулка несущего винта с автоматом перекоса вертолета МИ-8.
Снова вернемся к нашим вертолетам :-), этим красивым и удивительным (несмотря на их кажущуюся сегодня обычность) аппаратам. Поговорим немного подробнее о принципах их управления.
В статье «Как летает вертолет» я этого уже коснулся. Для того чтобы вертолет двигался поступательно, нужен перекос винта, и создает его такой агрегат, как автомат перекоса вертолета. Вот о нем сегодня и поговорим.
Как известно для вертолета полная аэродинамическая сила — это сумма всех сил, действующих на каждую лопасть в отдельности. Силы эти я бы разделил на искусственные и на естественные.
О естественных . Каждая лопасть имеет определенный вес. Поэтому при вращении с достаточно большой скоростью на нее действует центробежная сила . Есть еще сила сопротивления и конечно подъемная сила лопасти. Вот эту самую подъемную силу вполне можно корректировать силами искусственными . А это как раз и делает автомат перекоса винта вертолета. От него к каждой лопасти протянута специальная тяга, с помощью которой изменяется угол установки лопасти, то есть по сути дела угол атаки и, как следствие, подъемная сила.
Лопасти несущего винта, описывая полный круг вокруг оси при его вращении, обтекаются встречным потоком воздуха по-разному. Полный круг – это 360º . Тогда примем заднее положение лопасти за 0º и далее через каждые 90º полный оборот. Так вот лопасть в интервале от 0º до 180º — это лопасть наступающая , а от 180º до 360º — отступающая . Принцип такого названия, я думаю, понятен. Наступающая лопасть движется навстречу набегающему потоку воздуха, и суммарная скорость ее движения относительно этого потока возрастает потому что сам поток, в свою очередь, движется ей навстречу. Ведь вертолет летит вперед. Соответственно растет и подъемная сила. (Для примера приведу пояснительный рисунок из «заслуженной» 🙂 книги об управлении вертолетом МИ-1 .)
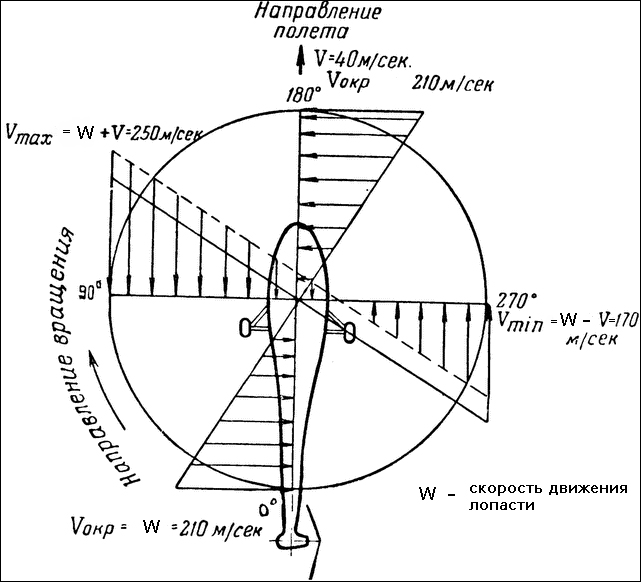
Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
У отступающей лопасти картина противоположная. От скорости набегающего потока отнимается скорость, с которой эта лопасть как бы от него «убегает» :-). В итоге имеем подъемную силу меньше. Получается серьезная разница сил на правой и левой стороне винта и отсюда явный переворачивающий момент . При таком положении вещей вертолет при попытке движения вперед будет иметь тенденцию к переворачиванию. Такие вещи имели место при первом опыте создания винтокрылых аппаратов.
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены во втулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов: горизонтальные, вертикальные и осевые.
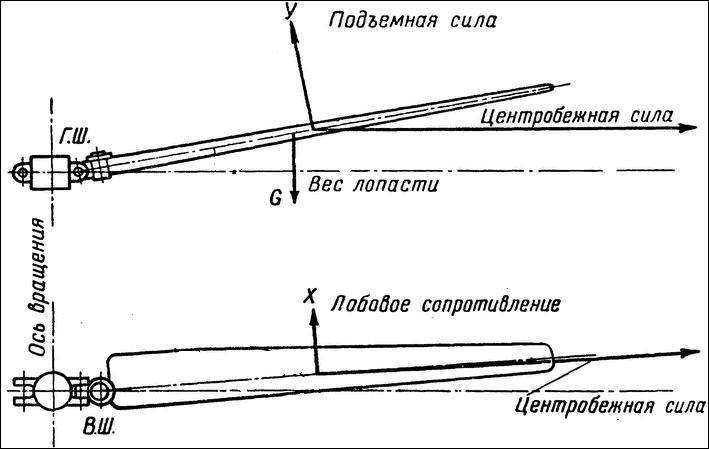
Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне.
От 0º до 90º скорость обтекания лопасти растет, значит растет и подъемная сила. Но! Теперь лопасть подвешена на горизонтальном шарнире. В результате избыточной подъемной силы она, поворачиваясь в горизонтальном шарнире, начинает подниматься вверх ( специалисты говорят «делает взмах »). Одновременно из-за увеличения лобового сопротивления (ведь скорость обтекания возросла) лопасть отклоняется назад, отставая от вращения оси винта. Для этого как раз и служит вертикальный шарнир.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. Здесь У – это подъемная сила, Х – сила сопротивления, Vy – вертикальное движение воздуха, α – угол атаки.)
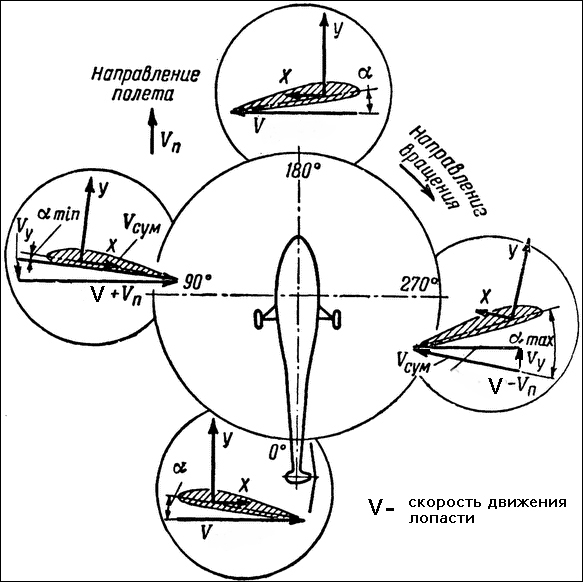
Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
До точки 90º избыточная подъемная сила будет продолжать расти, однако из-за вышесказанного со все большим замедлением. После 90º эта сила будет уменьшаться, но из-за ее присутствия лопасть будет продолжать двигаться вверх, правда все медленнее. Максимальную высоту взмаха она достигнет уже несколько перевалив за точку 180º . Это происходит потому, что лопасть имеет определенный вес, и на нее действуют еще и силы инерции .
При дальнейшем вращении лопасть становится отступающей, и на нее действуют все те же процессы, но уже в обратном направлении. Величина подъемной силы падает и центробежная сила вместе с силой веса начинают опускать ее вниз. Однако при этом растут углы атаки для набегающего потока (теперь уже воздух движется вверх по отношению к лопасти), и растет установочный угол лопасти из-за неподвижности тяг автомата перекоса вертолета. Все происходящее поддерживает подъемную силу отступающей лопасти на необходимом уровне. Лопасть продолжает опускаться и минимальной высоты взмаха достигает уже где-то после точки 0º , опять же из-за сил инерции.
Таким образом, лопасти вертолета при вращении несущего винта как бы « машут » или еще говорят «порхают». Однако это порхание вы, так сказать, невооруженным взглядом вряд ли заметите. Подъем лопастей вверх (как и отклонение их назад в вертикальном шарнире) очень незначительны. Дело в том, что на лопасти оказывает очень сильное стабилизирующее воздействие центробежная сила. Подъемная сила, например, больше веса лопасти в 10 раз , а центробежная – в 100 раз . Именно центробежная сила превращает на первый взгляд «мягкую» гнущуюся в неподвижном положении лопасть в жесткий, прочный и отлично работающий элемент несущего винта вертолета.
Однако несмотря на свою незначительность вертикальное отклонение лопастей присутствует, и несущий винт при вращении описывает конус, правда очень пологий. Основание этого конуса и есть плоскость вращения винта .
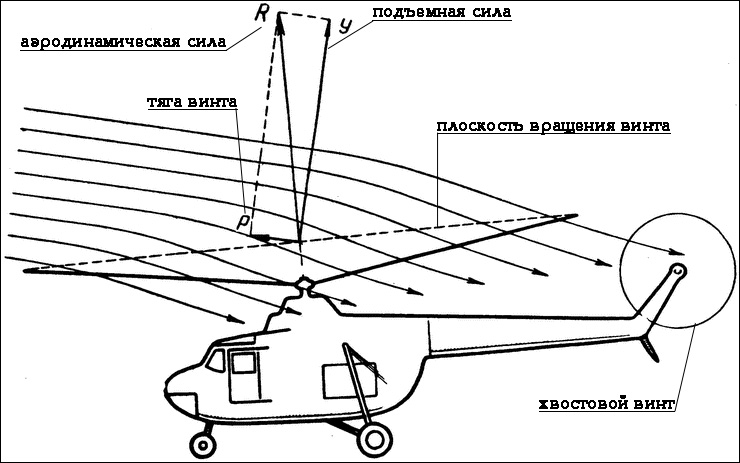
Силы, действующие на вертолет.
Теперь главная мысль :-). В известной статье я уже говорил, что для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
Исходя из описания движения лопасти при вращении винта, это означает, что лопасть в положении 180º должна опуститься, а в положении 0º (360º) должна подняться. То есть в точке 180º подъемная сила должна уменьшиться, а в точке 0º(360º) увеличиться. А это в свою очередь можно сделать уменьшив установочный угол лопасти в точке 180º и увеличив его в точке 0º (360º) . Аналогичные вещи должны происходить при движении вертолета в других направлениях. Только при этом, естественно, аналогичные изменения положения лопастей будут происходить в других угловых точках.
Понятно, что в промежуточных углах поворота винта между указанными точками установочные углы лопасти должны занимать промежуточные положения, то есть угол установки лопасти меняется при ее движении по кругу постепенно, циклично .Он так и называется циклический угол установки лопасти ( циклический шаг винта ). Я выделяю это название потому, что существует еще и общий шаг винта (общий угол установки лопастей). Он изменяется одновременно на всех лопастях на одинаковую величину. Обычно это делается для увеличения общей подъемной силы несущего винта.
Такие действия как раз и выполняет автомат перекоса вертолета. Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Тангаж означает угловое положение летательного аппарата относительно его поперечной оси (нос вверх-вниз :-)), а крен , соответственно, относительно его продольной оси (наклон влево-вправо :-)).
Конструктивно автомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же :-).
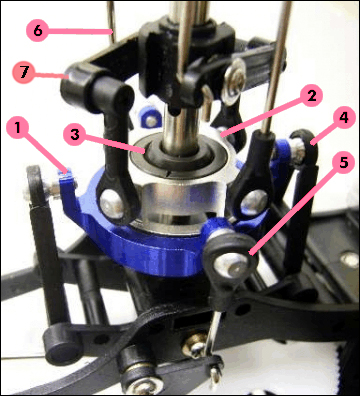
Автомат перекоса модели вертолета.
Это двухлопастной вертолет. Управление угловым положением каждой лопасти осуществляется через тяги 6 . Эти тяги соединены с так называемой внутренней тарелкой 2 (из белого металла). Она вращается вместе с винтом и в установившемся режиме параллельна плоскости вращения винта. Но она может менять свое угловое положение (наклон), так как закреплена на оси винта через шаровую опору 3 . При изменении своего наклона (углового положения) она воздействует на тяги 6 , которые, в свою очередь, воздействуют на лопасти, поворачивая их в осевых шарнирах и меняя, тем самым, циклический шаг винта.
Внутренняя тарелка одновременно является внутренней обоймой подшипника, внешняя обойма которого – это внешняя тарелка винта 1 . Она не вращается, но может менять свой наклон (угловое положение) под воздействием управления по каналу тангажа 4 и по каналу крена 5 . Меняя свой наклон под воздействием управления внешняя тарелка меняет наклон внутренней тарелки и в итоге наклон плоскости вращения несущего винта. В итоге вертолет летит в нужном направлении :-).
Общий шаг винта меняется перемещением по оси винта внутренней тарелки 2 при помощи механизма 7 . В этом случае угол установки меняется сразу на обеих лопастях.
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса. Комментировать их нет смысла :-)…
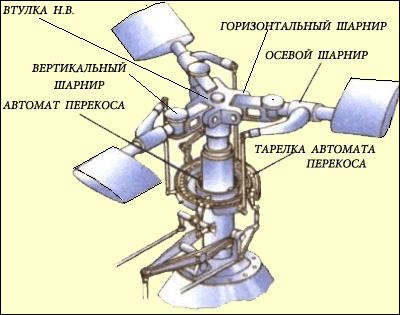
Втулка винта с автоматом перекоса (схема).
Поворот лопасти в вертикальном шарнире втулки несущего винта.
Изменение общего шага винта, лопасти поворачиваются в осевых шарнирах.
Вот пожалуй и все. Как видите, принципиально все достаточно просто. Конечно в практическом плане автомат перекоса вертолета — агрегат сложный, включающий в себя различные специальные узлы и устройства.

Втулка несущего винта с автоматом перекоса вертолета МИ-2.
В одной из следующих статей мы этого коснемся, а также рассмотрим как же непосредственно управляется вертолет из кабины пилота с использованием автомата перекоса и специальных органов управления.
В заключение я предлагаю вам посмотреть два ролика, которые достаточно наглядно иллюстрируют работу автомата перекоса несущего винта. Полезного просмотра и до новых встреч :-)…

