
Виды механических характеристик асинхронного двигателя
2.2 Моделирование статических характеристик асинхронного двигателя в пакете MATLAB
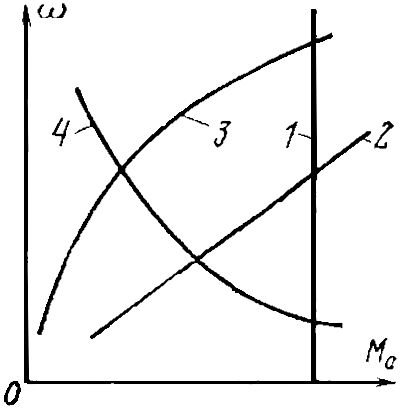
При исследовании электропривода наибольший интерес представляет реакция электродвигателя электромашинного агрегата и его механической характеристики на различные виды механических характеристик производственных механизмов.
Механической характеристикой механизма называют зависимость между угловой скоростью и моментом сопротивления механизма, приведенными к валу двигателя щ=f(Mс).
Среди всего многообразия выделяют несколько характерных типов механических характеристик механизмов:
1. Характеристика с моментом сопротивления, не зависящим от скорости. Такой характеристикой обладают, например, подъемные краны, лебедки, поршневые насосы при неизменной высоте подачи.
2. Характеристика с моментом сопротивления, линейно зависящим от скорости. Такая зависимость присуща, приводу генератора постоянного тока с независимым возбуждением, работающему на постоянную нагрузку.
3. Характеристика с нелинейным возрастанием момента. Типичными примерами здесь могут служить характеристики вентиляторов, центробежных насосов, гребных винтов. Для этих механизмов момент сопротивления Мс зависит от квадрата угловой скорости щ.
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента щд = f(Mс).
В состав электромашинного агрегата входят синхронный и асинхронный двигатели. При исследовании наибольший интерес представляет влияние различных видов производственных механизмов на асинхронный двигатель.
Рассмотрим, в чем состоит особенность кривой механической характеристики асинхронного двигателя при разных видах статической нагрузки на валу и как обеспечить возможность автоматического построения непрерывной, полной механической характеристики асинхронного двигателя.
Основной трудностью при получении механической характеристики асинхронного двигателя в различных прикладных пакетах является его опрокидывание при выходе на неустойчивые участки. Зачастую механическую характеристику асинхронного двигателя предлагается строить по точкам, последовательно задавая момент нагрузки и сохраняя полученную при этом скорость вращения. При такой методике точки механической характеристики могут быть получены только на участке устойчивой работы, а снятие режима короткого замыкания требует дополнительного изменения в модели. Помимо этого, к недостаткам данного подхода можно отнести, его трудоемкость, поскольку качество полученной характеристики напрямую зависит от количества точек.
MATLAB совместно с Simulink и SimPowerSystem позволяют исследовать процессы и параметры электрических машин, которые зачастую недоступны в реальных объектах. В библиотеках этих пакетов имеются многочисленные виртуальные элементы и измерительные приборы, позволяющие исследовать электрическую цепь любой сложности.
Основными преимуществами подхода являются:
— простота получения характеристик, исключающая необходимость использования дополнительных моделей для различных режимов работы двигателя;
— значительное сокращение времени на построение и наглядность представления;
— возможность анализа процессов в двигателе при его работе на неустойчивом участке механической характеристики.
Методика позволяет выбрать необходимые параметры модели нагрузки, автоматически строить механическую характеристику и переходные процессы работы двигателя, что дает возможность анализировать процессы в АД во всем диапазоне скоростей. Для понимания работы асинхронных машин необходимо знать, как будут изменяться токи, при вариации нагрузки на валу. Для этих целей была разработана виртуальная лабораторная установка представленная на рисунке 10.
Рисунок 10 — Модель для исследования асинхронной машины
Установка включает в себя:
— источник переменного напряжения AC Voltage Source из библиотеки SimPowerSystems/Electrical Sources;
— блок для удобства извлечения переменных машины из вектора Machines Measurement Demux из библиотеки SimPowerSystems /Machines;
— блок Display для количественного представления измеренных частоты вращения (рад/с) и момента (Нм) в ходе проведения исследования;
— блок Scope для наблюдения токов обмотки ротора и статора, а также скорости и момента асинхронной машины из главной библиотеки Simulink/Sinks;
— блок XY Graph для построения статической нагрузки и механической характеристики машины из главной библиотеки Simulink/Sinks ;
— блок Constant для задания и расчета механического момента на валу машины из главной библиотеки Simulink/Sources;
— блок Мuх, объединяющий два сигнала в один векторный из главной библиотеки Simulink/Sygnal Routing.
— блок Voltage Measurement, измеряет мгновенного значения напряжения между двумя узлами схемы из библиотеки SimPowerSystems/Measurements;
— блок To Workspace, сохраняет данные в рабочей области, библиотека Simulink/Sinks;
— блок Clock, формирует сигнал, величина которого на каждом шаге расчета равна текущему времени моделирования, библиотека Simulink/Sources;
— блок переключателя Switch, библиотека Simulink/Commonly Used Blocks;
— блок задания функции Fcn, библиотека Simulink/User-Defined Functions;
— блок Product, выполняет вычисление произведения текущих значений сигналов, библиотека Simulink/Commonly Used Blocks;
— блок Ramp, источник линейно изменяющегося воздействия, библиотека Simulink/Sources;
— исследуемую трехфазную асинхронную машину Asynhronous Machine из библиотеки SimPowerSystem /Machines.
В полях окна настройки параметров асинхронной машины последовательно задаются:
— тип ротора (Rotor Type), в выпадающем меню этого поля задаем короткозамкнутый ротор;
— система отсчета при анализе (Stationary) — неподвижная относительно статора;
— Номинальная мощность, действующее линейное напряжение и номинальная частота;
— сопротивление и индуктивность статора;
— сопротивление и индуктивность ротора;
— момент инерции, коэффициент трения и число пар полюсов;
— начальные условия для моделирования (скольжения, положение ротора, токи статора и их начальные фазы).
Параметры машины частично берутся из паспортных данных, а частично рассчитываются при помощи программы в MATLAB, текст которой приведен в приложении.
Далее параметры заносятся в окно настройки блока Asynhronous Machine (рис. 11).
Промоделируем основные типы статических нагрузок. В результате получили механические характеристики производственных механизмов и АД. Переходные процессы в АД приведены в приложении.1. Характеристика с моментом сопротивления, не зависящим от скорости.
Рисунок 11 — Окно настройки параметров асинхронной машины
Рисунок 12 — Механическая характеристика механизма и АД
2. Характеристика с моментом сопротивления, линейно зависящим от скорости
Рисунок 13 — Механическая характеристика механизма и АД
3. Характеристика с нелинейным возрастанием момента, момент сопротивления Мс зависит от квадрата угловой скорости щ «Рисунок ».
Рисунок 14 — Механическая характеристика механизма и АД
4. Снятие естественной механической характеристики, в установившемся режиме работы двигателя.
Рисунок 15 — Механическая характеристика АД во время разгона и естественная МХ АД
Механические характеристики производственных механизмов и электрических двигателей, используемых в электроприводах

При выборе электрического двигателя, приводящего в действие производственный механизм, необходимо соответствие механических свойств характеристикам производственного механизма .
Каждый производственный механизм в зависимости от технологического процесса имеет свою механическую характеристику. Механической характеристикой производственного механизма называется зависимость скорости вращения ωс от момента сопротивления производственного механизма Mс. Так как производственные механизмы обладают большим разнообразием характеристик. Чтобы как-то их классифицировать, используется эмпирическая формула:
Mс – момент сопротивления производственного механизма при скорости ω.
M – момент трения в движущихся частях производственного механизма.
Mсн – момент сопротивления при номинальной скорости вращения ωн.
x – показатель степени, характеризующий изменение момента сопротивления при изменении скорости.
Механические характеристики производственных механизмов.
1. При x=0 момент сопротивления не зависит от скорости вращения ω и механическая характеристика будет представлять собой прямую линию, параллельную оси скорости.
2. x=1 – линейно возрастающая характеристика. с увеличением сопротивления увеличивается и скорость вращения производственного механизма.
3. x=2 – характеристика не линейно возрастающая. Момент сопротивления будет зависеть от квадрата скорости.
4. x=-1 – характеристика нелинейно убывающая. Момент сопротивления Mс обратно пропорционален скорости, но при этом мощность будет оставаться постоянной.
Характеристика первого типа относится к таким производственным механизмам, как поршневые насосы, механизмы подачи станков, электрические приводы конвейеров.
Характеристики второго типа обычно бывают у механизмов подъема кранов.
Характеристиками третьего типа обладают вентиляторы, центробежные насосы, компрессоры.
Характеристику четвертого типа имеют приводы шпинделей и планшайб.
Электрические двигатели делятся на различные виды по жесткости характеристик:
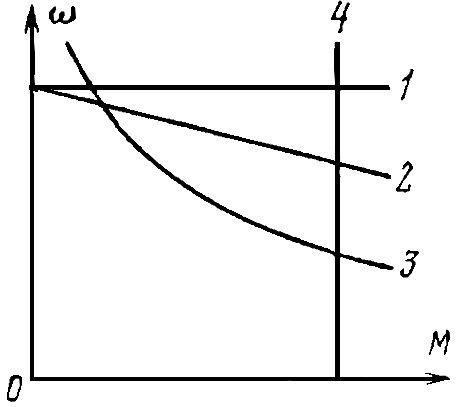
Механические характеристики электрических двигателей.
1. Абсолютно жесткая характеристика, у которой скорость вращения не зависит от нагрузки (β = ∞).
Жесткостью называется отношение приращения момента к приращению скорости:
2. Жесткая характеристика. Наклон этой характеристики относительно максимальной скорости зависит от параметров двигателя.
Характеристику этого типа имеет двигатель постоянного тока (ДПТ) и асинхронный двигатель на рабочей части механической характеристики.
3. Мягкая характеристика. Данная механическая характеристика отличается резким снижением скорости при увеличении нагрузки.
Характеристика этого типа будет у двигателей постоянного тока независимого и смешанного возбуждения.
4. Абсолютно мягкая характеристика (β = 0) — характеристика, при которой момент двигателя остается неизменным с изменением угловой скорости.
Данной характеристикой обладают двигатели постоянного тока с независимым возбуждением при питании их от источника тока или при работе в замкнутых системах электрического привода в режиме стабилизации тока якоря.
Размещено на реф.рф
Для построения механической характеристики можно воспользоваться круговой диаграммой либо формулой
получаемой из формулы
путем подстановки значения тока I‘2 из схемы замещения:
Для машин мощностью более 10 кВт величина С1 ≈ 1 и формула момента приобретают более простой вид:
Задаваясь значениями s, при известных параметрах двигателя можно определить М и построить искомую механическую характеристику.
Механическая характеристика (рис. 1, а и б) имеет максимум момента при частоте вращенияn2 ≈ (0,8 ÷ 0,9) n1; при частоте вращения n2 = n1 момент вращения М = 0, а при n2 = 0 пусковой момент составляет Мп = (0,3 ÷ 0,7) Mmax.
Скольжение, при котором момент имеет максимальное значение (критическое скольжение), можно определить из (2), взяв производную от момента по скольжению dM/ds и приравняв ее нулю.
Решая уравнение относительно s, получаем критическое скольжение:
 |
| Рис. 1. Механическая характеристика асинхронной машины |
В первом приближении, принимая C1 = 1,0 и пренебрегая величиной R1 в знаменателе [так какR1 2 /<2ω1 C1 [± R1 + √R1 2 + (X1 + C1 X’2 ) 2 ]>,
или, приближенно считая С1 = 1и R1 = 0,
 |
| Рис. 2. Зависимость электромагнитного момента и тока ротора от скольжения |
Знак ʼʼ+ʼʼ относится к двигательному режиму, ʼʼ-ʼʼ — к генераторному.
Из уравнения (4) и круговой диаграммы видно, что максимальный момент не зависит от активного сопротивления ротора. Это сопротивление определяет лишь скольжение при максимальном моменте.
При увеличении скольжения от s = 0 до 1, как следует из круговой диаграммы, ток ротора I‘2 монотонно возрастает, в то время как электромагнитный момент М сначала увеличивается с ростом скольжения, достигает максимума при s = sкр, а затем уменьшается, несмотря на возрастание токаI‘2 (рис. 2).
Физически это объясняется тем, что в формуле момента М = смФтI2 х cos ψ2 при малых сколь жениях преобладающее влияние имеет возрастание тока I2. При увеличении скольжения свыше sкр ток I2возрастает сравнительно мало и преобладающее влияние оказывает уменьшение cos ψ2, ĸᴏᴛᴏᴩᴏᴇ происходит вследствие повышения частоты в роторе: f2 = sf1 .
Построение механической характеристики по каталожным данным. На практике широко используют приближенное аналитическое выражение механической характеристики. Электромагнитный момент асинхронного двигателя
Принимая приближенно E2 ≈ const, т. е. считая, что магнитный поток машины при изменении нагрузки не изменяется, и приравнивая нулю производную dM/ds, полученную из формулы (5), можно найти критическое скольжение, соответствующее максимальному моменту, sкр = ±R2 /X2 и соответственно максимальный момент
Разделив выражение (5) на (6), после преобразования получим
Формула (7) является приближенной и, конечно, дает погрешность, так как не учитывает падение напряжения в обмотках статора. Особенно велика погрешность при переходе из двигательного режима в генераторный, где разница в моментах должна быть значительной. При этом для исследования одного режима выведенная формула дает приемлемую точность. Это объясняется тем, что в области малых скольжений от s = 0 до sкр магнитный поток изменяется незначительно и, следовательно, в этой области формула не может дать большой погрешности, тем более, что точки при s = 0 и sкр являются фиксированными.
При скольжениях, близких к единице, формула (7), казалось бы, должна давать завышенные значения момента͵ гак как при больших токах сильнее проявляется падение напряжения в статоре. При этом в реальных машинах при скольжениях, близких к единице, уменьшается сопротивление Х2 из-за явления вытеснения тока в проводниках ротора, что ведет к увеличению момента. В результате оказывается, что погрешность, обусловленная пренебрежением падения напряжения в статоре, и погрешность, вызванная изменением параметров ротора, взаимно противоположны, вследствие чего точность приближенной формулы (7) достаточна для практических целей.
Механические характеристики асинхронного двигателя. — понятие и виды. Классификация и особенности категории «Механические характеристики асинхронного двигателя.» 2017, 2018.
Читайте также
Зависимость электромагнитного момента от скольжения. Наибольшее значение для оценки свойств асинхронного двигателя имеет механическая характеристика, представляющая собой графическую зависимость частоты вращения ротора п2от вращающего момента М, т. е. п2 = f(M) или М =. [читать подробнее].
Уравнение вращающего момента Вращающий момент в асинхронном двигателе создается взаимодействием тока ротора с магнитным полем статора. Вращающий момент математически можно выразить через электромагнитную мощность двигателя. (5.13) (5.14) где &. [читать подробнее].
Ремонт Стабилизаторов напряжения, Инверторов в Киеве
Осуществляем гарантийный ремонт, и послегарантийный ремонт стабилизаторов напряжения:
- Стабилизатора напряжения: Luxeon, Logic Power, Kebo, Delixi, Forte, Norma, Normik, Optima, Optimum, Rucelf, Sven, Uniel, Volter, Voto, Елекс Герц-Ампер, Елім, Ресанта, Вольт и другие.
- Инвертора: Luxeon, Kebo. .

Качественно, Быстро.
Преимущества которые мы Вам предлагаем выполняя ремонт стабилизаторов и инверторов:
- Успешный опыт работы на рынке ремонта бытовой техники 15лет ;
- Ремонт осуществляеться в мастерской с использованием специального оборудования;
- Высокое качество ремонта вашего стабилизатора напряжения, инвертора;
- Быстрое выполнение работ;
- Гарантия на ремонт стабилизаторов, инверторов.
Ремонт и сервис стабилизаторов напряжения
Несколько ситуаций, которые приводят устройство в негодность и ремонт стабилизатора неизбежен.
Неправильно подобранная модель стабилизатора
Частая причина поломки стабилизатора — нехватка запаса мощности. Не секрет, что украинские производители не применяют полную гальваническую развязку в выпускаемых устройствах, чтобы компенсировать потери мощности при падениях напряжения, необходимо учитывать запас при выборе и покупке стабилизатора.
В 35% случаев, клиенты покупают стабилизатор без запаса мощности.
Устройство которое постоянно работает на пределе возможностей, будет регулярно перегреваться, в следствие чего сработает защита от перегрева, которая предотвратит возможность возгорания. Определить причину отключения аппарата довольно просто, для этого посмотрите на дисплей стабилизатора и прочтите описание отображаемой ошибки в руководстве по эксплуатации. Но работа стабилизатора будет нарушена, это тревожный симптом того, что модель выбрана некорректно. Если перегрев будет повторяться регулярно, обратитесь за консультацией в сервисный центр по ремонту стабилизаторов напряжения.
Недостоверные данные о напряжении или нагрузке
По большому счету, это подраздел первого пункта, но данные проблемы встречаются не так редко, поэтому рассмотрим их более подробно.
Нередко, при желании сэкономить, клиенты намеренно предоставляют нашим консультантам недостоверные показатели падения напряжения и оговаривают меньшую мощность электроприборов, которые необходимо питать от стабилизатора. В итоге получается, что модель куплена с недостаточной мощностью или стандартный диапазон входного напряжения не подходит.
Установка и окружающая среда
Как и любое другое электрооборудование, стабилизаторы напряжения требуют правильных условий эксплуатации. К примеру, нельзя размещать устройство в закрытом помещении с малым объемом воздуха: ниши, полости в стене и т.п. Ознакомиться с руководством по установке можно в документации к купленному устройству — руководство по эксплуатации или с нашей статьей об установке стабилизатора и схемах подключения.
Брак комплектующих
Ремонт электромеханических стабилизаторов вызван в том числе и браком комплектующих.
Безусловно, брак не исключен. Нельзя проверить сотни компонентов, которые присутствуют в электрических цепях стабилизатора досконально. Возможно, что успешно пройдя наладку и тестирование, что-то пришло в негодность. При таком исходе событий, непременно свяжитесь с сотрудниками нашего сервисного центра для согласования ремонта.
В это небольшой статье были изложены основные причины, по которым может произойти ремонт стабилизатора напряжения.
Релейные стабилизаторы напряжения
Наша мастерская по ремонту стабилизаторов и других электронных устройств занимается ремонтом уже больше 15 лет! За этот немалый срок нам удалось не однократно участвовать в спорах на тему «Какая модель лучше», Статья — «Релейные стабилизаторы напряжения», благодаря которой Вы узнаете, насколько это хороший тип устройств, надежен ли он, и какие имеет преимущества и недостатки.
В первую очередь стоит отметить, что релейные стабилизаторы работают практически по тому же принципу, что и тиристорные (симисторные). Суть заключается в переключении обмоток трансформатора при помощи силового реле (ступени). Скорее первыми производились релейные стабилизаторы напряжения, чем симисторные. Данный тип нормализаторов может быть также полезен как и любой другой, обслуживаться может практически любая нагрузка: компьютеры, частные дома, отдельное электрооборудование, торговые площадки, офисные центры и т. д. Мощность релейных нормализаторов не так высока как симисторных или итальянских сервоприводных ORTEA и не превышает 100кВа, именно по этому это скорее бытовой нормализатор,чем промышленный.
Характеристики релейных стабилизаторов напряжения
Скорость срабатывания от 40 до 80 мс;
Перегрузки в размере 200% в течении 4-8 секунд;
Форма напряжения не искажена;
Температурный режим ограничен максимальным значением температурного режима реле;
Достоинства и недостатки релейных стабилизаторов
Механический износ реле, срок службы до 5 лет, в зависимости от интенсивности эксплуатации.
Ремонт релейных стабилизаторов самый дешевый.
Ступенчатая регулировка напряжения, перепады от 8 до 3% от номинального напряжения 220 Вольт;
Чем выше класс точности устройства, тем ниже скорость срабатывания при изменении напряжения.
Нередко предполагается, что данный тип устройств вносит помехи в электрическую сеть, что может неблагоприятно оказываться на аудио- и видео- оборудовании.
Как и другие типы нормализаторов, данные устройства могут быть исполнены в трехфазном варианте. По сути основным недостатком устройства является то, что его сложно отнести к полностью электронным стабилизатором за счет того, что в составе содержится механические компоненты — реле. А это основной инструмент при переключении обмоток автотрансформатора. Тип стабилизатора подбирается строго от поставленных задач перед ним, некоторые типы просто не в состоянии обеспечить правильное напряжение с заданными параметрами из-за недостатков принципа работы.
» Как выбрать стабилизатор напряжения? «
Как выбрать стабилизатор напряжения?
Основной характеристикой стабилизаторов напряжения является мощность подключаемой нагрузки. Именно на основании этого параметра осуществляется выбор той или иной модели. При этом необходимо учитывать, что мощность стабилизатора должна быть равна или немного больше мощности того прибора, для защиты которого он предназначен. Таким образом, рассчитав мощность всех приборов, защиту которых необходимо обеспечить, можно легко определить, какая модель стабилизатора напряжения необходима в данном случае. Можно, конечно, не углубляясь в длительные вычисления, приобрести стабилизатор максимальной мощности. Однако такая модель будет стоить дорого, и имеет ли смысл устанавливать этот стабилизатор, мощность которого будет использоваться лишь на 15-20%.
Очень важно помнить, что некоторые электроприборы имеют пусковые токи, в несколько раз превышающие токи номинальные. Это характерно для приборов, имеющих в схеме асинхронные двигатели, например холодильники, насосы, поэтому стабилизатор для таких устройств необходимо подбирать с двух — трехкратным запасом мощности что уменьшит потребность выполнять ремонт стабилизаторов или инвертора .
Как защитить одновременно большое количество электроприборов, например, у себя в офисе?
Необходимо учесть несколько факторов: во-первых, как организована разводка питающего напряжения в здании, т.е. насколько удобно будет встраивать один общий однофазный или трёхфазный стабилизатор напряжения или несколько отдельных стабилизаторов в уже имеющуюся электроразводку; во-вторых, как правило, один большой стабилизатор, равный по мощности нескольким отдельным, обходится дешевле. Но индивидуальная защита эффективнее и суммарная надежность нескольких стабилизаторов гораздо выше надежности одного.
Хороший стабилизатор достаточно дорог.
В каких случаях можно считать, что его приобретение оправданно?
Можно уверенно сказать, что такая покупка на 100% оправдывает себя в двух случаях.
Во-первых, когда напряжение настолько низкое, что без его стабилизации бытовые приборы не работают (характерно для сельских электросетей).
Во-вторых, если стоимость приборов в 3-5. 10 раз выше стоимости стабилизатора.
Для того чтобы окончательно определиться с выбором стабилизатора напряжения, необходимо ответить на следующие вопросы:
Какой нужен стабилизатор напряжения — однофазный или трехфазный, что об этом говорят мастера выполняющие ремонт стабилизаторов?
При однофазной сети (220В) вопросов не возникает.
В случае трехфазной сети (380В) возможны варианты:
Если при наличии трехфазной сети есть хотя бы один трехфазный потребитель, то необходимо установить трехфазный стабилизатор напряжения. Если же все потребители однофазные, в большинстве случаев лучше подобрать три однофазных стабилизатора. Как правило, это обходится дешевле. Но есть и еще одно серьезное преимущество. Этот вариант позволяет обойти особенность трёхфазных стабилизаторов, а именно отключение всего устройства при исчезновении напряжения на одной из фаз.
Нужно ли ставить отдельные стабилизаторы напряжения на разные потребители, или лучше поставить один на все?
Если вам необходимо защитить какой-то определенный потребитель, будет достаточно одного стабилизатора соответствующей мощности. Если же вы хотите обезопасить максимальное количество электроприборов, то можно, конечно, поставить на каждый прибор свой, отдельный стабилизатор, но это не очень удобно, а финансово — и не очень выгодно. В этом случае лучше будет установить один общий стабилизатор напряжения на все потребители. Хотя существуют и другие варианты. Например, выделить определенную группу электроприборов, которые наиболее критически относятся к перепадам напряжения, и где будет ремонт дешевле, чем ремонт стабилизаторов .
Какой мощности нужен стабилизатор напряжения?
Для правильного выбора модели стабилизатора напряжения необходимо определить сумму мощностей (Вт) всех потребителей, нуждающихся одновременно в снабжении электроэнергией.
При подсчете мощности, потребляемой устройством, следует учитывать, так называемую, полную мощность. Полная мощность — это вся мощность, потребляемая электроприбором. Она состоит из активной мощности и реактивной мощности, в зависимости от типа нагрузки. Активная мощность всегда указывается в ваттах (Вт), полная — в вольт-амперах (ВА). Устройства — потребители электроэнергии зачастую имеют как активную, так и реактивную составляющие нагрузки.
Активная нагрузка.
У этого вида нагрузки вся потребляемая энергия преобразуется в тепло. У некоторых устройств данная составляющая является основной. К таким устройствам относятся лампы накаливания, обогреватели, электроплиты, утюги и т. п. Если их указанная потребляемая мощность составляет 1 кВт, для их питания достаточно стабилизатора мощностью 1кВА.
Реактивные нагрузки.
Все остальные. Они, в свою очередь, подразделяются на индуктивные и емкостные.
Важно! Необходимо учитывать, что электродвигатели имеют пусковые токи и мощность стабилизатора при использовании асинхронных двигателей, компрессоров, насосов должна в 3-5 раз превышать номинальную мощность потребителей. Также желательно принимать во внимание, что заводы производители рекомендуют устанавливать стабилизаторы напряжения с запасом мощности 20-30%.
Раcпечатано из сайта www.initiativa.com.ua
(044) 235-57-57 235-04-91  (050)330-82-32
(050)330-82-32  (068)070-93-05
(068)070-93-05
Киев, ул. Ярославов Вал, 28 (вход с ул. Гончара в арку) м. Золотые Ворота

