
Частотные преобразователи для асинхронных двигателей
Частотные преобразователи для асинхронных двигателей
Преобразователи общепромышленного применения. EI -7011
Новая серия, разработанная на базе самого популярного преобразователя EI-7001.
Широко используются в технологическом оборудовании, где применяется управляемый электропривод: смесителях, дозаторах, производственных линиях, системах водоснабжения, вентиляции, дымососах, подъемно-транспортном и т.п. оборудовании.
Насосные преобразователи. EI-P7002
 Технические характеристики.
Технические характеристики.
- Диапазон мощностей 15 кВт — 220 кВт.
- Полная защита двигателя.
- Встроенный ПИД-регулятор
- Управление по вольт-частотной характеристике U/F
- Язык команд пульта управления — русский
- Аналоговые и цифровые входы/выходы для регулирования и дистанционного управления
- Питание 380 В, 50 Гц
Специализированные преобразователи для управления приводами с «вентиляторной нагрузкой»: центробежными насосами, вентиляторами, воздуходувками, центрифугами, компрессорами и т. д.
Экономия электроэнергии при использовании преобразователей в подобных системах может достигать 30-60%!
Преобразователи векторного типа. EI-9011

Технические характеристики.
- Диапазон мощностей 0,75 кВт — 1250 кВт (более 300 кВт — по спецзаказу)
- Полная защита двигателя.
- Векторное управление без обратной связи по скорости
- Векторное управление с обратной связью по скорости.
- Встроенный ПИД-регулятор.
- 32-разрядный RISC микропроцессор.
- Язык команд пульта управления — русский
- Аналоговые и цифровые входы/выходы для регулирования и дистанционного управления
- Возможность дистанционного управления и мониторинга по RS-232/RS-485 (протокол MODBUS)
- Питание 380 В, 50 Гц
Учитывают дополнительно, кроме амплитудно-частотных характеристик, фазовые соотношения полей статора и ротора, что обеспечивает достижение максимального момента на валу двигателя.
Основная область применения — системы с динамичным и контролируемым изменением скорости перемещения, сервоприводы, лифтовое и другое подъемно-транспортное оборудование с большими перегрузками при пуске и остановке.
Малогабаритные векторные преобразователи EI-8001

Технические характеристики.
- Диапазон мощностей 0,75 кВт — 11 кВт
- Полная защита двигателя.
- Векторное управление без обратной связи.
- Встроенный ПИД-регулятор.
- Аналоговые и цифровые входы/выходы для регулирования и дистанционного управления.
- Питание 220/380 В, 50 Гц
Простая и недорогая модель для массового применения в компактном исполнении.
Малогабаритные векторные преобразователи E2-8300

Технические характеристики.
- Диапазон мощностей 0,4 кВт – 55 кВт.
- Выходная частота 0,1 – 650 Гц.
- Полная защита двигателя.
- Векторное управление без обратной связи.
- Встроенный ПИД-регулятор.
- Встроенный PLC контроллер.
- Программирование группы преобразователей с помощью модуля копирования.
- Аналоговые и цифровые входы/выходы для регулирования и дистанционного управления.
- Возможность дистанционного управления и мониторинга по RS-232/RS-485 (протокол MODBUS).
- Встроенный ЭМИ фильтр класса А.
- Питание 220/380 В, 50 Гц.
Новая модель серии EI-8000 со встроенным промышленным PLC контроллером и существенно расширенными функциональными возможностями по отношению к EI-8001.
Рекомендуется для управления приводами с постоянной, быстроменяющейся, а также вентиляторной нагрузкой: подъемно-транспортное оборудование, транспортеры, конвейеры, экструдеры, куттера, упаковочные и дозирующие машины, сушильные агрегаты, сепараторы, мельницы, дробилки, вентиляторы, насосы, компрессоры и т.д
Компактные преобразователи частоты для общепромышленного применения. E3-8100

Технические характеристики.
- Диапазон мощностей 0,2 кВт – 7,5 кВт.
- Выходная частота 0,1 – 400 Гц.
- Улучшенный алгоритм управления U/f, обеспечивающий низкий шум двигателя и высокий пусковой момент.
- Оптимальное управление моментом двигателя для любых нагрузок.
- Мониторинг и управление по RS — 422/485 с возможностью подключения до 32 преобразователей в локальную сеть.
- Программирование группы преобразователей с помощью съемного пульта.
- Быстродействующая защита от кратковременных перегрузок, работающая без отключения двигателя.
- Питание 220/380 В, 50 Гц.
Новая серия преобразователей включает модель Е3-8100 для маломощных приводов и ее бюджетную версию Е3-8100К.
Модели Е3-8100 и Е3-8100К могут использоваться для управления приводами в большинстве общепромышленных механизмов. Они идеально подходят в тех случаях, когда требуется максимальная производительность, небольшие габариты преобразователя и низкая цена.
Преобразователи серии MINI. EI-MINI

Технические характеристики.
- Функция реверса
- 2-проводное или 3- проводное управление
- Цифровой выход для диагностики привода
- Постоянный или переменный вращающий момент характеристики U/f
- Максимальная частота 100 Гц
- Источник питания +15 В для внешних приборов
- Внешние входы для управления и сброса ошибки
- Электронная защита двигателя от перегрузок
Бескорпусные преобразователи малой мощности от 0,2 до 1,5 кВт
Новые преобразователи серии MINI. E2-MINI

Технические характеристики.
- Диапазон мощностей 0,2 кВт – 2,2 кВт.
- Выходная частота 1 – 200 Гц.
- Защита двигателя от перегрузок.
- Аналоговые и цифровые входы/выходы для регулирования и дистанционного управления.
- Встроенный ЭМИ фильтр класса А.
- Питание 220/380 В, 50 Гц
Новое поколение популярного преобразователя серии MINI. В отличие от предшествующей модели преобразователь выполнен в компактном корпусе IP 20 со встроенным пультом управления, ЭМИ фильтром и расширенным набором функций.
Рекомендуется для управления приводами насосов, вентиляторов, лентопротяжных машин, фасовочно-упаковочных аппаратов, швейных машин, намоточно-размоточных узлов, транспортеров, навивочных машин, миксеров и т.д
Частотный преобразователь — виды, принцип действия, схемы подключения
 Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. За одну минуту их число возрастает в 60 раз и составляет 50х60=3000 оборотов. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля.
Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями.
Виды частотных преобразователей
По конструкции частотные преобразователи бывают:
1. индукционного типа;
Асинхронные электродвигатели, выполненные по схеме с фазным ротором и запущенные в режим генератора, являются представителями первого вида. Они при работе обладают низким КПД и отмечаются маленькой эффективностью. Поэтому они не нашли широкого применения в производстве и используются крайне редко.
Способ электронного преобразования частоты позволяет плавно регулировать обороты как асинхронных, так и синхронных машин. При этом может быть реализован один из двух принципов управления:
1. по заранее заданной характеристике зависимости скорости вращения от частоты (V/f);
2. метод векторного управления.
Первый способ является наиболее простым и менее совершенным, а второй используется для точного регулирования скоростей вращения ответственного промышленного оборудования.
Особенности векторного управления частотным преобразованием
Отличием этого способа является взаимодействие, влияние устройства управления преобразователя на «пространственный вектор» магнитного потока, вращающийся с частотой поля ротора.
Алгоритмы для работы преобразователей по этому принципу создаются двумя способами:
1. бессенсорного управления;
Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции (ШИМ) инвертора для заранее подготовленных алгоритмов. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Этим способом пользуются при управлении несколькими электродвигателями, подключенными параллельно к преобразователю частоты. Потокорегулирование подразумевает контроль рабочих токов внутри двигателя с разложением их на активную и реактивную составляющие и внесение корректив в работу преобразователя для выставления амплитуды, частоты и угла для векторов выходного напряжения.
Это позволяет повысить точность работы двигателя и увеличить границы его регулирования. Применение потокорегулирования расширяет возможности приводов, работающих на малых оборотах с большими динамическими нагрузками, такими как подъемные крановые устройства или намоточные промышленные станки.
Использование векторной технологии позволяет применять динамическую регулировку вращающихся моментов к трехфазным асинхронным двигателям.
Принципиальную упрощенную электрическую схему асинхронного двигателя можно представить следующим видом.
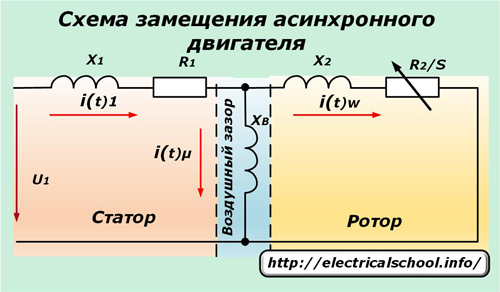
На обмотки статора, обладающие активным R1 и индуктивным X1 сопротивлениями, приложено напряжение u1. Оно, преодолевая сопротивление воздушного зазора Хв, трансформируется в обмотку ротора, вызывая в ней ток, который преодолевает ее сопротивление.
Векторная диаграмма схемы замещения
Ее построение помогает понять происходящие процессы внутри асинхронного двигателя.
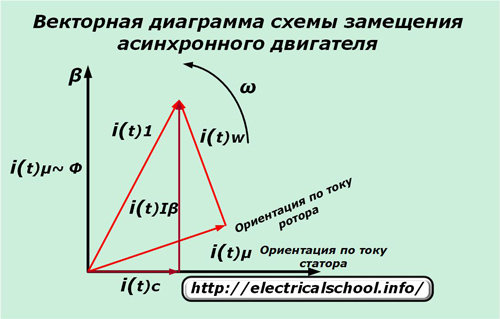
Энергия тока статора разделяется на две части:
iµ — потокообразующую долю;
iw — моментообразующую составляющую.
При этом ротор обладает активным сопротивлением R2/s, зависящим от скольжения.
Для бессенсорного управления измеряются:
По их значениям рассчитывают:
iµ — потокообразующую составляющую тока;
iw — моментообразующую величину.
В алгоритм расчета уже заложили электронную эквивалентную схему асинхронного двигателя с регуляторами тока, в которой учтены условия насыщения электромагнитного поля и потерь магнитной энергии в стали.
Обе этих составляющих векторов тока, отличающиеся по углу и амплитуде, вращаются совместно с системой координат ротора и пересчитываются в стационарную систему ориентации по статору.
По этому принципу подстраиваются параметры частотного преобразователя под нагрузку асинхронного двигателя.
Принцип работы частотного преобразователя
В основу этого устройства, которое еще называют инвертором, заложено двойное изменение формы сигнала питающей электрической сети.
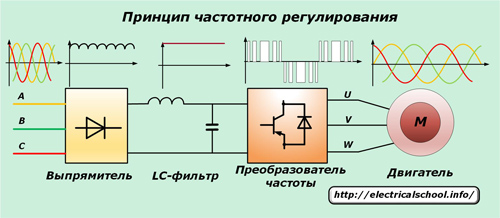
Вначале промышленное напряжение подается на силовой выпрямительный блок с мощными диодами, которые убирают синусоидальные гармоники, но оставляют пульсации сигнала. Для их ликвидации предусмотрена батарея конденсаторов с индуктивностью (LC-фильтр), обеспечивающая стабильную, сглаженную форму выпрямленному напряжению.
Затем сигнал поступает на вход преобразователя частоты, который представляет собой мостовую трехфазную схему из шести силовых транзисторов серии IGBT или MOSFET с диодами защиты от пробоя напряжений обратной полярности. Используемые ранее для этих целей тиристоры не обладают достаточным быстродействием и работают с большими помехами.
Для включения режима «торможения» двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим энергию. Такой прием позволяет убирать генерируемое двигателем напряжение для защиты конденсаторов фильтра от перезарядки и выхода из строя.
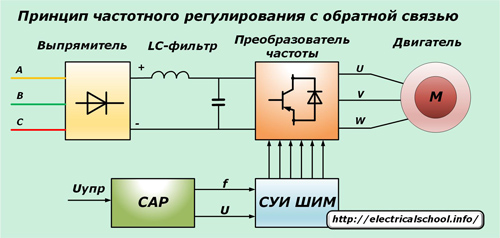
Способ векторного управления частотой преобразователя позволяет создавать схемы, осуществляющие автоматическое регулирование сигнала системами САР. Для этого используется система управления:
2. ШИМ (широтного импульсного моделирования).
Метод амплитудного регулирования основан на изменении входного напряжения, а ШИМ — алгоритма переключений силовых транзисторов при неизменном напряжении входа.
При ШИМ регулировании создается период модуляции сигнала, когда обмотка статора подключается по строгой очередности к положительным и отрицательным выводам выпрямителя.
Поскольку частота такта генератора довольно высокая, то в обмотке электродвигателя, обладающего индуктивным сопротивлением, происходит их сглаживание до синусоиды нормального вида.
![]()
![]()
Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой. Они стали доступны благодаря развитию технологий управления силовыми запираемыми тиристорами серии GTO или биполярных марок транзисторов IGBT, обладающих изолированным затвором.
Принципы их включения для управления трехфазным двигателем показаны на картинке.
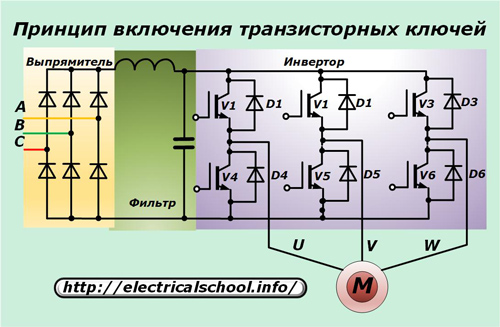
Каждый из шести IGBT-транзисторов подключается по встречно-параллельной схеме к своему диоду обратного тока. При этом через силовую цепь каждого транзистора проходит активный ток асинхронного двигателя, а его реактивная составляющая направляется через диоды.
Для ликвидации влияния внешних электрических помех на работу инвертора и двигателя в конструкцию схемы преобразователя частоты может включаться помехозащитный фильтр, ликвидирующий:
наводимые работающим оборудованием электрические разряды.
Их возникновение сигнализирует контроллер, а для уменьшения воздействия используется экранированная проводка между двигателем и выходными клеммами инвертора.
С целью улучшения точности работы асинхронных двигателей в схему управления частотных преобразователей включают:
ввода связи с расширенными возможностями интерфейса;
информационный Led-дисплей, отображающий основные выходные параметры;
тормозной прерыватель и встроенный ЭМС фильтр;
систему охлаждения схемы, основанную на обдуве вентиляторами повышенного ресурса;
функцию прогрева двигателя посредством постоянного тока и некоторые другие возможности.
Эксплуатационные схемы подключения
Частотные преобразователи создаются для работы с однофазными или трехфазными сетями. Однако, если есть промышленные источники постоянного тока с напряжением 220 вольт, то от них тоже можно запитывать инверторы.

Трехфазные модели рассчитываются на напряжение сети 380 вольт и выдают его на электродвигатель. Однофазные же инверторы питаются от 220 вольт и на выходе выдают три разнесенных по времени фазы.
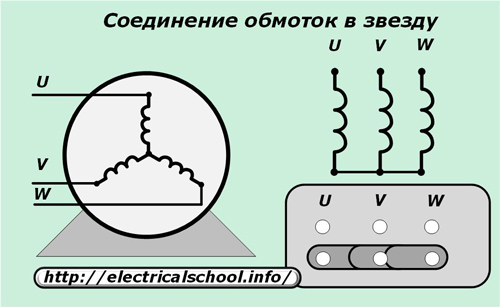
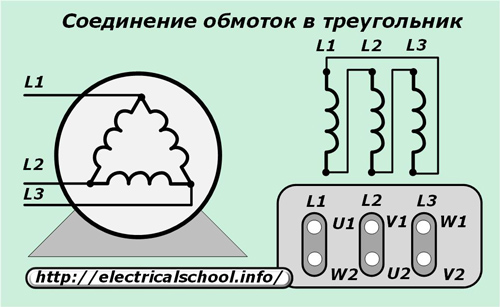
Схема подключения частотного преобразователя к двигателю может быть выполнена по схемам:
Обмотки двигателя собираются в «звезду» для преобразователя, запитанного от трехфазной сети 380 вольт.
По схеме «треугольник» собирают обмотки двигателя, когда питающий его преобразователь подключен к однофазной сети 220 вольт.
Выбирая способ подключения электрического двигателя к преобразователю частоты надо обращать внимание на соотношение мощностей, которые может создать работающий двигатель на всех режимах, включая медленный, нагруженный запуск, с возможностями инвертора.
Нельзя постоянно перегружать частотный преобразователь, а небольшой запас его выходной мощности обеспечит ему длительную и безаварийную работу.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Ранее на эту тему: Электропривод
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Вольт частотная характеристика асинхронного двигателя

- Дозировочные насосы НД и НДР
Дозировочные насосы с регулированием подачи
изменением числа ходов плунжера. Общие сведения.
Среди известных методов регулирования величины подачи электронасосных дозировочных агрегатов на ходу без остановки двигателя, наряду с методом регулирования длиной хода плунжера, все большее применение находит метод регулирования изменением числа ходов плунжера насоса.
Этот метод легко реализуется применением частотно-регулируемого асинхронного электропривода, обеспечивающего регулирование числа оборотов электродвигателя агрегата.
Частотно-регулируемые приводы выпускаются ведущими фирмами мира, специализирующимися на промышленной электронике. Цена привода определяется мощностью электродвигателя, характеристиками его контроллера и именем фирмы производителя.
К безусловным достоинствам метода относится возможность достаточно просто встраивать простые дозировочные агрегаты типа НД, не имеющие регулирования без остановки двигателя (в том числе и имеющиеся у потребителя), в общую систему автоматического управления технологическим процессом.
К недостаткам метода относится значительное увеличение времени такта подачи, возрастающей с уменьшением подачи от номинального значения, что для некоторых применений может являться недопустимым.
Современные приводы могут обеспечивать два способа управления асинхронным двигателем:
— частотный способ: пользователь может сам формировать различные зависимости V=f(F) для конкретных задач;
— векторное управление: позволяет автоматически получить оптимальную выходную характеристику.
Проведённые стендовые испытания показали для случая работы насоса с постоянным давлением на выходе, что при управлении по вольт-частотной характеристике обеспечивается надёжная работа в диапазоне 40% – 120% от значения номинальной подачи (частота питания двигателя 20 – 60 Гц).
Векторное управление обеспечивает работоспособность двигателя агрегата в диапазоне 0,5 – 50 Гц, что соответствует диапазону регулирования 1 – 100% значения номинальной подачи. Фактический нижний диапазон регулирования подачи определяется условием работы насоса.
На низких значениях частоты питания электродвигателя его встроенный вентилятор не обеспечивает охлаждение электродвигателя и необходимо применение модернизированного двигателя с дополнительным вентилятором
Комплектация электроприводом может быть выполнена нашим предприятием или самостоятельно покупателем.
ВАЖНО!
Поскольку работа насосного агрегата относится к тяжелым условиям эксплуатации (особенно момент пуска агрегата нагруженного на напорную линию под давлением) рекомендуется в частотно-регулируемый привод устанавливать частотный преобразователь превышающий по мощности электроприводный двигатель на единицу типовой мощности.
Например: для электродвигателя мощностью 5 кВт необходимо выбрать частотный преобразователь на мощность 7,5 кВт.
Базовыми рядами для изготовления агрегатов типа НД. Р. Ч и НД. Э. Ч являются базовые ряды агрегатов типа НД.
Нашим предприятием предлагается новейшая разработка по регулированию величины подачи изменением числа ходов плунжера — интеллектуальный привод, интегрированный в насос.
Блоки управления:
ООО «Завод дозировочной техники «Ареопаг» осуществляет производство, поставку и внедрение средств автоматики управления насосами любой сложности. Это и простейшие блоки управления насосами НД, и комплексные системы автоматизации насосного оборудования для станций и блоков дозирования, или с внедрением в существующий комплекс теплоэлектростанций, химических и пищевых производств, с применением эффективных алгоритмов управления.
При решении нестандартных задач мы осуществляем:
– предварительную проработку по внедрению средств автоматики;
– разработку технического задания, согласование ТЗ с заказчиком;
– проектирование и производство оборудования соответствующего ТЗ;
– монтаж и пуско-наладку оборудования на объекте, обучение персонала.
Основные отличия блоков управления:
– по исполнению: под различные климатические условия, пылевлагозащищённость (IP), взрывозащита (Ex);
– по проработке — под конкретные условия заказчика или по типовым схемам;
– по сложности – от релейной схема на основе контактора, схемы на основе частотника и до ПЛК;
– по способу управления – местный и/или удалённый, дискретный и/или цифровой.
– в основе решения блоков управления: Пуск/Останов насоса, защита насоса по Min/Max давлению
Имеется возможность комплектации насосов НД специальными блоками управления Гидроматик.
Преимущества векторного управления асинхронным двигателем
Линейная скалярная рабочая характеристика ПЧ
При работе асинхронного электродвигателя от скалярного частотного преобразователя напряжение на двигателе понижается линейно с понижением частоты. Это происходит из-за того, что применяется широтно-импульсная модуляция (ШИМ), при которой отношение действующего напряжения к частоте является константой во всем диапазоне регулирования.
Вольт-частотная (вольт-герцовая) рабочая характеристика ПЧ будет линейной, пока напряжение на возрастет до предела, определяемого напряжением питания преобразователя. Скалярное управление не позволяет двигателю развить требуемую мощность на низких частотах (мощность зависит от напряжения), и момент на валу сильно падает.
Квадратичная скалярная рабочая характеристика
В некоторых случаях, например, при работе преобразователя на мощные вентиляторы и насосы, используют квадратичную вольт-частотную характеристику с пониженным моментом, что позволяет учесть механику процесса, снизить токи, и, соответственно, потери на низких частотах.
Основной минус скалярной вольт-частотной характеристики
У линейной и квадратичной вольт-частотной зависимости, при её простоте и широком распространении, есть большой минус – падение мощности на валу, а значит падение момента и частоты вращения двигателя. При этом происходит так называемое скольжение, когда частота вращения ротора отстает от частоты вращения электромагнитного поля.
Для устранения этого эффекта используется компенсация скольжения, позволяющая скорректировать выходную частоту (обороты двигателя) при возрастании момента нагрузки. Если правильно выбрать значение компенсации, фактическая скорость вращения при большой нагрузке будет приближаться к скорости вращения на холостом ходу.
Кроме этого, в большинстве ПЧ с линейной вольт-частотной характеристикой имеется функция компенсации момента на низких скоростях. Данная функция реализуется за счет повышения напряжения на низких частотах и при неправильном применении может вызвать перегрев двигателя.
Оба параметра компенсации имеют неизменное (установленное при настройке) значение и от нагрузки не зависят.
Преимущества векторного управления
Существует множество задач, когда нужно обеспечить заданную частоту вращения, и описанный недостаток становится очень актуальным. В таких случаях применяют векторное частотное управление, при котором контроллер вычисляет напряжение, необходимое для поддержания момента, обеспечивающего стабильную частоту. В отличие от скалярного режима, здесь происходит «умное» управление магнитным потоком ротора.
Векторное управление асинхронным двигателем особенно актуально на низких частотах – ниже 10 Гц, когда рабочий момент двигателя сильно падает. Кроме того, данный метод позволяет держать стабильную скорость (с предсказуемым линейным изменением) при разгоне. Это достигается за счет получения высокого пускового момента вплоть до выхода двигателя на режим.
Важно и то, что при векторном управлении происходит сбережение электроэнергии (в некоторых случаях – до 60%), поскольку большую часть времени частотный преобразователь передает в двигатель ровно столько энергии, сколько необходимо для поддержания заданной скорости.
Различают два вида векторного управления — без датчика скорости (без обратной связи, или бессенсорное) и с обратной связью, когда в качестве датчика, как правило, используется энкодер.
Векторное управление без обратной связи
В этом случае частотный преобразователь вычисляет скорость вращения двигателя по математической модели на основе ранее введенных данных (параметров двигателя) и данных о мгновенных значениях тока и напряжения. Опираясь на полученные расчеты, ПЧ принимает решение об изменении выходного напряжения.
Перед включением векторного бессенсорного режима необходимо тщательно выставить номинальные параметры двигателя: напряжение, ток, частоту, скорость (обороты), мощность, количество полюсов, а также сопротивление обмоток и индуктивные параметры. Если какие-то значения неизвестны, рекомендуется провести автотестирование двигателя на холостом ходу. Некоторые модели частотных преобразователей устанавливают параметры по умолчанию для стандартного двигателя после введения номинальных значений. Также необходимо задать пределы временных и токовых параметров векторного управления.
Векторное управление с обратной связью
Этот режим отличается более высокой точностью управления скоростью двигателя. Обратную связь обеспечивает энкодер, который сопрягается с частотным преобразователем через дополнительный модуль.
Энкодер устанавливается на валу электродвигателя либо последующего механизма и передает данные о текущей частоте вращения. На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя.
Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.

