
Исполнительный бесколлекторный двигатель постоянного тока, ИБДПТ1-Н-К
Исполнительный бесколлекторный двигатель постоянного тока, ИБДПТ1-Н-К

Компания ООО «Денар-проф» готова предложить своим клиентам, произвести и поставить учебные стенды по автоматике и АСУ ТП для ВПО, СПО, НПО.
Мы предлагаем Вашему вниманию стенд, стоимость комплекта 161300 руб. Стоимость указана актуальная и действует на 1 квартал 2021 года.
Мы готовы как к осуществлению поставки оборудования, так и к полному формированию проекта, подготовке всей необходимой документации и укомплектованию лабораторию «под ключ». Наша компания на практике подтверждает свою мобильность и надежность. Качество учебных и лабораторных стендов находится на высоком уровне, вся продукция проходит ОТК. Оборудование производится в нужные для Вас сроки и по доступной цене.
Нашими клиентами уже стали сотни университетов, техникумов, колледжей и училищ по всей России и странам ближнего зарубежья. Надеемся на плодотворное сотрудничество!
Стенды из раздела:

Датчики технологических параметров ДТП1-C-Р
Цена данного комплекса актуальна на 2021 год

Автоматизация технологических процессов и производств на основе приборов ОВЕН АТПП1-Н-К
Цена данного комплекса актуальна на 2021 год

Датчики технологических параметров ДТП1-Н-Р
Цена данного комплекса актуальна на 2021 год

Средства автоматизации и управления САУ1-С-К
Цена данного комплекса актуальна на 2021 год

Датчики технологических параметров ДТП1-Н-Р
Цена данного комплекса актуальна на 2021 год

Программируемый робот ПРО1-К
Цена данного комплекса актуальна на 2018 год
- В наличии!
- Авиация и космонавтика
- Автодело
- Автоматизация производства
- Автоматика и робототехника
- АЗС
- Аэрокосмическая техника
- Безопасность жизнедеятельности
- Бытовая техника
- Газовая динамика, вентиляция
- Гидравлика
- Гидропривод и гидроавтоматика
- Горные машины и оборудование
- ЖКХ
- Материаловедение
- Машиностроение
- Метрология
- Мехатроника и робототехника
- Микроэлектроника
- Насосное и компрессорное оборудование, вакуумная техника
- Нетрадиционные и возобновляемые источники энергии
- Нефте и газо добыча и переработка
- Отопление и водоснабжение
- Пневматика, пневмопривод и пневмоавтоматика
- Радиотехника
- Светотехника
- Силовая электроника
- Система электроснабжения
- Строительство
- Сельское хозяйство
- Телекоммуникации и связь
- Теплотехника и термодинамика
- Умные сети
- Физика
- Экология
- Электрические измерения
- Электрические машины и электроприводы
- Электромеханика
- Электромонтаж и наладка
- Электрооборудование автомобилей
- Электроснабжение железных дорог
- Электротехника и электроника
- Электротехнические материалы
- Электроэнергетика
- Элементы систем автоматики
- Энергоаудит
- Энергосбережение
- Разрезные модели
© Компания ООО «Денар-проф» — производство и поставка качественных учебно-лабораторных стендов, 2007-2021.
г. Ярославль, ул. Чехова, оф. 4, тел.: (4852) 59-58-29 e-mail: info@denar-prof.ru
Сайт не является публичной офертой, производитель оставляет за собой право изменять внешний вид и функциональные возможности.
Коммерческое использование, копирование, передача и распространение расположенной на нашем сайте информации в любом виде допускается только с письменного разрешения автора данного сайта. Вся информация на сайте защищена и принадлежит владельцам сайта.
исполнительный двигатель
Большой англо-русский и русско-английский словарь . 2001 .
- исполнительный блок
- исполнительный директор
Смотреть что такое «исполнительный двигатель» в других словарях:
исполнительный двигатель — vykdomasis variklis statusas T sritis automatika atitikmenys: angl. servomotor vok. Servomotor, m; Stellmotor, m rus. исполнительный двигатель, m; серводвигатель, m pranc. servomoteur, m ryšiai: sinonimas – servovariklis … Automatikos terminų žodynas
Генератор-двигатель система — («Генератор двигатель» система) электропривода, система «Г Д», система Леонарда, система Электропривода, в которой исполнительный электродвигатель постоянного тока независимого возбуждения питается от генератора тока также независимого… … Большая советская энциклопедия
Электрический однооборотный исполнительный механизм — Эта статья или раздел нуждается в переработке. Пожалуйста, улучшите статью в соответствии с правилами написания статей. Электрическ … Википедия
Система управления — Структура управления систематизированный (строго определенный) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение с целью достижения определённых целей. Объектом системы управления могут быть как… … Википедия
Servomotor — vykdomasis variklis statusas T sritis automatika atitikmenys: angl. servomotor vok. Servomotor, m; Stellmotor, m rus. исполнительный двигатель, m; серводвигатель, m pranc. servomoteur, m ryšiai: sinonimas – servovariklis … Automatikos terminų žodynas
Stellmotor — vykdomasis variklis statusas T sritis automatika atitikmenys: angl. servomotor vok. Servomotor, m; Stellmotor, m rus. исполнительный двигатель, m; серводвигатель, m pranc. servomoteur, m ryšiai: sinonimas – servovariklis … Automatikos terminų žodynas
servomoteur — vykdomasis variklis statusas T sritis automatika atitikmenys: angl. servomotor vok. Servomotor, m; Stellmotor, m rus. исполнительный двигатель, m; серводвигатель, m pranc. servomoteur, m ryšiai: sinonimas – servovariklis … Automatikos terminų žodynas
servomotor — vykdomasis variklis statusas T sritis automatika atitikmenys: angl. servomotor vok. Servomotor, m; Stellmotor, m rus. исполнительный двигатель, m; серводвигатель, m pranc. servomoteur, m ryšiai: sinonimas – servovariklis … Automatikos terminų žodynas
vykdomasis variklis — statusas T sritis automatika atitikmenys: angl. servomotor vok. Servomotor, m; Stellmotor, m rus. исполнительный двигатель, m; серводвигатель, m pranc. servomoteur, m ryšiai: sinonimas – servovariklis … Automatikos terminų žodynas
серводвигатель — vykdomasis variklis statusas T sritis automatika atitikmenys: angl. servomotor vok. Servomotor, m; Stellmotor, m rus. исполнительный двигатель, m; серводвигатель, m pranc. servomoteur, m ryšiai: sinonimas – servovariklis … Automatikos terminų žodynas
Исполнительный двигатель с полюсным управлением




![]()
![]()
![]()
![]()
В отличие от двигателей с якорным управлением у исполнительных двигателей с полюсным управлением обмоткой управления является обмотка полюсов, а обмоткой возбуждения — обмотка якоря (см. рис. 1.2, б).
Якорь двигателя постоянно подключен к сети с напряжением UB = const. Для ограничения тока иногда последовательно с якорем включают балластное сопротивление Rдоб. На обмотку полюсов напряжение управления Uy (сигнал) подается лишь тогда, когда необходимо вращение якоря.


 Из-за отсутствия насыщения основной магнитный поток Фу пропорционален току Iу и напряжению Uy управления:
Из-за отсутствия насыщения основной магнитный поток Фу пропорционален току Iу и напряжению Uy управления:
Здесь  — коэффициент сигнала.
— коэффициент сигнала.
При вращении якоря в его обмотке, называемой в данном двигателе обмоткой возбуждения, наводится ЭДС
Как и в любом двигателе постоянного тока, ток возбуждения (якоря)
 , (1.19)|
, (1.19)|
где rв — сопротивление обмотки якоря.
Вращающий момент двигателя создается за счет взаимодействия тока якоря Iв с магнитным потоком полюсов Фу:
Подставив в равенство (1.20) выражения потока из (1.17) и тока из (1.19), а затем заменив в полученном уравнении ЭДС Ев согласно (1.18), получим уравнение момента
 . (1.21)
. (1.21)
За единицу момента в системе относительных единиц примем как и у двигателя с якорным управлением, пусковой момент Мпуск1 при неподвижном якоре n=0 в случае равенства напряжений управления и возбуждения (α=1):
Поделив действительный момент М на единичный Мпуск1, найдем выражение момента в относительных единицах:
 . (1.22)
. (1.22)
Примем за единичную частоту вращения n01 ту же частоту, что и при якорном управлении (1.9), т. е. частоту вращения при идеальном холостом ходе (при n=0) при условии равенства напряжений управления и возбуждения (Uy=Uв; α=l). Тогда, заменив в выражении (1.22) сесф на  и
и  на ν (относительная частота), получим уравнение механической характеристики двигателя с полюсным управлением m=f(v) при α= const:
на ν (относительная частота), получим уравнение механической характеристики двигателя с полюсным управлением m=f(v) при α= const:
m = α — α 2 v. (1.23)
Из этого уравнения следует, что механические характеристики двигателя с полюсным управлением являются прямыми линиям (рис.1.6).
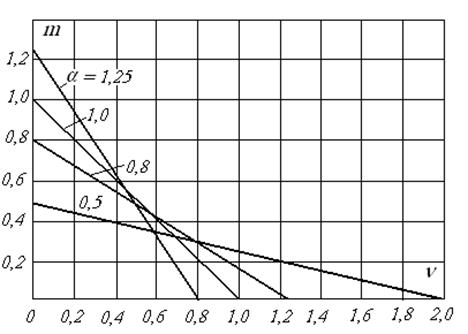
Рис. 1.6 Механические характеристики при полюсном управлении
В отличие от двигателя с якорным управлением жесткость механических характеристик при изменении коэффициента сигнала α (напряжения управления Uy) не остается постоянной. Чем меньше α, тем меньше жесткость характеристик, т. е. больше изменение частоты при меньших изменениях момента.
Начальный пусковой момент двигателя (при ν=0) здесь так же, как и у двигателей с якорным управлением, прямо пропорционален напряжению управления (коэффициенту сигнала α). В относительных единицах mnycк= α.
Частота вращения при идеальном холостом ходе (ν при m=0) в отличие от ранее рассмотренных исполнительных двигателей не прямо, а обратно пропорциональна напряжению управления Uy или коэффициенту сигнала α:
 . (1.24)
. (1.24)
Теоретически при Uу=0 (α=0) частота вращения ν возрастет до бесконечности (двигатель пойдет «в разнос»). Но в реальных двигателях этого не наблюдается, так как даже при холостом ходе якорь двигателя испытывает некоторый момент сопротивления, обусловленный трением в подшипниках, щеточном контакте и трением вращающихся частей о воздух, т. е. момент сопротивления двигателя практически никогда не равен нулю.
Однако при Uу=0 (при отсутствии нагрузки на валу) частота вращения якоря может в несколько раз превосходить его номинальную частоту вращения, что весьма опасно, ибо может привести к разрушению двигателя — «разносу». Опасность разноса особенно велика у двигателей сравнительно большой мощности, где момент трения во много десятков раз меньше номинального момента.
Наилучшей гарантией от «разноса» двигателя является наличие на его валу постоянного момента сопротивления, исключающего возможность работы двигателя вхолостую.
Уравнение регулировочной характеристики двигателя с полюсным управлением v=f(a) при m=const может быть получено путем преобразования уравнения механической характеристики (1.23):
 (1.25)
(1.25)
Из уравнения (1.25) и рис. 1.2 видно, что в отличие от двигателя с якорным управлением регулировочные характеристики дви 

 гателя с полюсным управлением нелинейны—частота вращения ν не изменяется прямо пропорционально напряжению управления Uу (коэффициенту сигнала α).
гателя с полюсным управлением нелинейны—частота вращения ν не изменяется прямо пропорционально напряжению управления Uу (коэффициенту сигнала α).

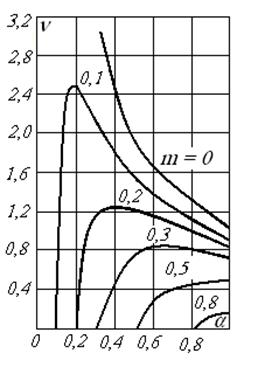
Рис. 1.7 Регулировочные характеристики при полюсном управлении
Нелинейность регулировочных характеристик является большим недостатком двигателей с полюсным управлением. Однако еще большим недостатком этих двигателей является неоднозначность регулировочных характеристик при малых моментах сопротивления (от 0 до 0,5 Мпуск)—одна и та же частота вращения может быть получена при двух различных по величине напряжениях управления (коэффициентах сигнала α).
Исполнительные двигатели с полюсным управлением обычно применяются в схемах автоматики, где момент сопротивления на валу двигателя не опускается ниже 0,5 Мпуск1. Это исключает неоднозначность регулировочных характеристик и возможность разноса двигателя при отсутствии напряжения управления.
Напряжение трогания у двигателя с полюсным управлением так же, как и у двигателя с якорным управлением, пропорционально моменту сопротивления на валу (при ν=0; αтр=m)
Мощность возбуждения двигателя с полюсным управлением является мощностью в цепи якоря:
Эта мощность составляет основную часть потребляемой двигателем мощности (95% у двигателей с номинальной мощностью 200 ÷ 250 Вт и 70% у двигателей с мощностью 5 ÷7 Вт). Она равна сумме полной механической мощности на валу двигателя и потерь в якоре.
Обычно обмотка возбуждения питается от сети, мощность которой почти не лимитируется в отличие от мощности усилителей, питающих обмотку управления. Поэтому большое в процентном отношении значение мощности возбуждения (в цепи якоря) является ценным качеством двигателя с полюсным управлением, выгодно отличающим его от двигателя с якорным управлением, где большая часть потребляемой мощности поступает от усилителя.
Мощность управления двигателя постоянного тока с полюсным управлением идет лишь на покрытие электрических потерь в обмотках полюсов:
 .
.
Ее величина по сравнению со всей мощностью, потребляемой двигателем, а также по сравнению с мощностью возбуждения весьма незначительна, особенно при малых напряжениях управления (коэффициентах сигнала α). Даже при номинальных напряжениях управления (α=1) она составляет не более 30% от всей мощности, потребляемой двигателями мощностью 5÷7 Вт и не более 5% —двигателями мощностью 200÷250 Вт.
Малая мощность управления — положительное качество двигателей с полюсным управлением и большое их преимущество перед двигателями с якорным управлением.
Полная механическая мощность на валу двигателя может быть выражена как произведение момента на частоту вращения. Если момент выразить из равенства (1.23), то
p2=mν=(α—α 2 ν)ν=αν—α 2 ν 2 . (1.27)
Продифференцировав р2 по ν и приравняв производную нулю, можно найти частоту вращения νp2max , при которой механическая мощность максимальна:
 (1.28)
(1.28)
Так как согласно (1.24) частота вращения при холостом ходе двигателя в относительных единицах , то, очевидно, максимум механической мощности имеет место при частоте вращения, равной половине частоты вращения при холостом ходе.
Подставив νp2max в выражение (1.27), найдем максимальную механическую мощность в относительных единицах:

Из полученного выражения следует, что величина максимальной механической мощности не зависит от коэффициента сигнала α (напряжения управления Uy). Согласно уравнению (1.28) от него зависит частота вращения, при которой имеет место максимум мощности
Независимость максимума механической мощности от напряжения управления (коэффициента сигнала α) — ценное качество двигателей постоянного тока с полюсным управлением, позволяющее даже при незначительных напряжениях управления получать значительные механические мощности на валу двигателя.
На рис. 1.8 представлено семейство кривых p2=f(ν) при α=const (где α=0,25; 0,50; 0,75; 1,0), наглядно иллюстрирующее вышесказанное.
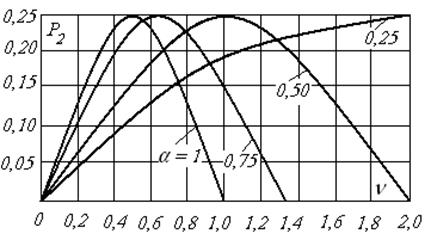
Рис. 1.8 Зависимости механической мощности от частоты вращения при полюсном управлении
Исполнительные двигатели и тахогенераторы
Дата публикации: 26 сентября 2014 .
Категория: Статьи.
Общие положения
Исполнительными двигателями называются двигатели, которые применяются в системах автоматического управления и регулирования различных автоматизированных установок и предназначены для преобразования электрического сигнала (напряжения управления), получаемого от какого-либо измерительного органа, в механическое перемещение (вращение) вала с целью воздействия на соответствующий регулирующий или управляющий аппарат. Если напряжение и мощность сигнала малы для управления исполнительным двигателем, то применяются промежуточные усилители мощности (магнитные, электронные, полупроводниковые).
Номинальная мощность исполнительных двигателей обычно составляет от долей ватта до нескольких киловатт. К этим двигателям предъявляются большие требования по точности работы и быстродействию. Обычно требуется, чтобы зависимости момента M и скорости n от напряжения сигнала (управления) Uу были по возможности линейными.
Существует ряд разновидностей исполнительных двигателей постоянного и переменного тока. Ниже кратко рассматриваются исполнительные двигатели постоянного тока.
Исполнительные двигатели нормальной конструкции
По своему устройству они аналогичны нормальным машинам постоянного тока. При якорном управлении ток возбуждения iв = const, а на якорь подается напряжение управления Uу. Характеристики M = f (Uу) и n = f (Uу) при этом получаются практически линейными. При полюсном управлении на якорь подается напряжение Ua = const, а напряжение управления, Uу подается на обмотку возбуждения. При этом требуется меньшая мощность управления, однако характеристика n = f (Uу) не будет линейной. Поэтому чаще применяется якорное управление.
Магнитоэлектрические машины
В связи с разработкой сплавов ални (Al – Ni), алнико (Al – Ni – Co), а также ряда других сплавов, обладающих высокими магнитными свойствами, стало возможным изготовление машин без обмотки возбуждения, с постоянными магнитами на индукторе. В частности, с постоянными магнитами изготовляются исполнительные двигатели с якорным управлением мощностью до 50 – 100 Вт.
С постоянными магнитами можно строить также генераторы и двигатели общего назначения мощностью до 5 – 10 кВт и выше. Такие машины получили широкое распространение.
Исполнительные двигатели с полым немагнитным якорем
Вследствие малой инерции такие двигатели обладают большим быстродействием. Полый якорь в виде стаканчика изготовляется из пластмассы, и на нем размещается и укрепляется якорная обмотка обычного типа, соединенная с коллектором. Внутренний неподвижный ферромагнитный сердечник (статор) при якорном управлении может быть массивным (рисунок 1).
Рисунок 1. Исполнительный двигатель постоянного тока с полым немагнитным якорем
1 – переднй щит; 2 – щеткодержатель; 3 – крышка смотрового люка; 4 – коллектор; 5 – станина; 6 – обмотка возбуждения; 7 – полюс; 8 – полый якорь; 9 – внутренний статор; 10 – задний щит
Из-за наличия большого немагнитного зазора между внешним и внутренним статорами требуется сильная обмотка возбуждения, габариты машины увеличиваются, а коэффициент полезного действия уменьшается. Подобные двигатели выпускаются мощностью до 10 – 15 Вт.
Двигатели с печатной обработкой якоря
Двигатели с печатной обработкой якоря (рисунок 2), также обладают малой инерцией. Якорь этого двигателя имеет вид тонкого диска из немагнитного материала (текстолит, стеклотекстолит и так далее), на обеих сторонах которого расположены медные проводники обмотки якоря. Проводники выполняются путем гальванического травления листов медной фольги, наклеенных на диск якоря, либо гальваническим осаждением или переносом меди. Обмотка, изготовляемая таким способом, получила название печатной. Схема обмотки якоря обычная, двухслойная, причем проводники отдельных слоев расположены на разных сторонах диска и соединяются электрически между собой через отверстия в диске. Серебряно-графитные щетки скользят по неизолированной поверхности элементов обмотки якоря, как по коллектору.

Рисунок 2. Двигатель постоянного тока с печатной обмоткой якоря: а – разрез двигателя; б – обмотка якоря
1 – диск якоря с обмоткой; 2 – вал; 3 – втулка; 4 – щетки и щеткодержатель; 5 – постоянные магниты (полюсы); 6 – полюсные наконечники; 7 и 8 — диски из магнитной стали
Возбуждение осуществляется с помощью постоянных магнитов или обмотки возбуждения. Напряжение таких машин составляет 6 – 50 В. Ввиду хороших условий охлаждения допустимы большие плотности тока в обмотке якоря (до 30 – 40 А/мм² при продолжительном режиме работы). В случае необходимости быстрого торможения после снятия напряжения сигнала диск якоря изготовляется из алюминия.
Тахогенераторы
Тахогенераторы представляют собой маломощные электрические генераторы (обычно до Pн = 10 – 50 Вт), которые служат в системах автоматики для преобразования скорости вращения в электрический сигнал (напряжение Uс). От тахогенераторов требуется линейная зависимость Uс = f (n) с точностью до 0,2 – 0,5 %, а иногда с точностью до 0,01 %. В маломощных тахогенераторах при n = 1000 об/мин напряжение Uс = 3 – 5 В, а в более мощных тахогенераторах обычного применения при такой же скорости вращения Uс = 50 – 100 В.
Большинство тахогенераторов имеет обычную конструкцию машин постоянного тока с независимым возбуждением при iв = const или с постоянными магнитами. При необходимости уменьшения механической инерции и устранения зубцовых пульсаций напряжения применяют конструкцию с полым якорем (смотрите рисунок 1). Разработаны также униполярные тахогенераторы (смотрите рисунок 7, в статье «Специальные типы генераторов и преобразователей постоянного тока») с электромагнитным возбуждением или с постоянными магнитами. При этом отсутствуют коллекторные пульсации напряжения, однако Uс мало.
Исполнительные двигатели и тахогенераторы нормальной конструкции и с постоянными магнитами выпускались в СССР серийно.
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.

