Как выбрать шаговый двигатель подходящего размера
Как выбрать шаговый двигатель подходящего размера?
Мой последний заячий проект включает в себя шаговый двигатель. Но как узнать, какой степпер выбрать?
Я добавляю степпер к ведущему винту моего токарного станка. Он будет использоваться для каналов и потоков. Для кормов поведение степпера не критично; ему просто нужно двигаться с постоянной скоростью. Однако для потоков пропущенные шаги ужасны; при выполнении последовательных проходов инструментальный наконечник не выровняется с ранее вырезанной канавкой так, как должен. Это система с разомкнутым контуром, поэтому, если она идет не так, она остается неправильной.
Каретка (часть перемещается) составляет около 10 фунтов. Он едет по хорошо смазанным «путям», но масса — это масса.
Меня не сильно волнует скорость перевозки. При нарезании резьбы шпиндель вращается медленно, возможно, на 1 оборот в секунду, а во многих случаях даже медленнее. По сути, нет случая, когда каретка должна двигаться быстро. В самом крайнем случае, с резьбой 4 TPI, каретка будет перемещаться на 1 дюйм за 8 секунд. Это 0,8 RPS для степпера для моей конфигурации. Подача будет намного медленнее.
Как указывалось ранее, каретка не должна увязать и терять шаг, даже когда резец инструмента внезапно переходит из воздуха в сталь. Крутящий момент, детка, крутящий момент.
При заправке несколько тысячных долей материала удаляется за один проход.
Консультации о том, как определить размер степпера, приветствуются.
Я только что выполнил расчет, который нашел на сайте Gecko . По их словам, мне нужен степпер размером с наперсток. Такое ощущение, что добавление шагового механизма в ходовой винт токарного станка является угловым случаем, поскольку движение в дюймах в секунду очень мало. Если я помню, это означает, что двигатель будет очень крутящим, но будет горячим; ток и движение обратно пропорциональны. Поэтому мне, возможно, придется быстрее запустить степпер и снизить скорость.
Если скорость и ускорение не являются проблемой, то нужно решить еще две проблемы с механическими характеристиками. Одним из них является крутящий момент. Вы должны измерить величину крутящего момента, необходимого для поворота циферблатов на токарном станке, одновременно делая его самый глубокий разрез в стали. Вы инженер-механик, я оставлю вас думать о способе его измерения.
Посмотрите таблицы данных для рассматриваемых шаговых двигателей, и у них должен быть график скорости / крутящего момента:
Вы можете видеть, что крутящий момент этого двигателя примерно достигает пика при 0,8 Нм. Но в этот момент он едва может двигаться. Очевидно, что вы не будете использовать этот двигатель для любого крутящего момента выше 0,5Нм. Выберите двигатель с большим крутящим моментом.
Другая проблема — это разрешение, которое вам нужно. Опять же, вам решать, какое разрешение вам нужно, и какой у вас действительно кабель. Шаговые двигатели, как правило, 200 или 400 шагов на оборот.
Если 1 «занимает 8 с, а двигатель вращается со скоростью 0,8 об / мин, то один оборот дает 0,156» хода (это метрический токарный станок?). Для 200-шагового двигателя каждый шаг дает 0,78 тыс. Ходов. Это довольно хорошо на самом деле. Если вы использовали драйвер микрошагового мотора, это существенно увеличит разрешение. Вы должны сделать это в любом случае, даже если вы не хотите дополнительное разрешение. Микропереключение предотвратит резонанс двигателя, возникающий на определенных скоростях.
Что такое размер шаговый двигатель
Шаговый двигатель NEMA 8 8HY2406
Stepper мотор (или мотор шага) представляет собой бесколлекторный электродвигатель постоянного тока, который разделяет полный оборот на несколько равных шагов. Положение мотора можно после этого приказать, что двинуло и придержало на одном из этих шагов без любого датчика обратной связи (регулятора незамкнутой сети), покуда мотор быть осторожным определен размер к применению.
Переключенные моторы реактивности очень большие шагая моторы с уменьшенным отсчетом полюса, и вообще коммутированный короткозамкнутый виток.

Вы получите следующий шаговый двигатель NEMA 8 8HY2406:
















Типы
Существует четыре основных типа шаговых двигателей:
1: stepper постоянного магнита (смогите быть подразделено в «жестяную банку» и «гибрид», жестяную банку более дешевый продукт, и гибрид с более высокомарочными подшипниками, более малым углом шага, более высокой плотностью мощности)
3:с переменным магнитным сопротивлением
4:низкая тип шагового двигателя
Моторы постоянного магнита используют постоянный магнит (PM) в Роторе и приводятся в действие дальше притяжение или отталкивание между Ротором PM и электромагнитами статора. Двигатели с переменным сопротивлением (VR) имеют простой железный Ротор и работают по принципу, что минимальное сопротивление возникает с минимальным зазором, следовательно, точки Ротора притягиваются к полюсам магнитов статора. Гибридные шаговые двигатели названы, потому что они используют комбинацию методов PM и VR для достижения максимальной мощности в небольшом размере пакета.
Двухфазные шаговые двигатели
Существуют две основные схемы намотки электромагнитных катушек в двухфазном шаговом двигателе: биполярная и униполярная.
Униполярные двигатели
Униполярный шаговый двигатель имеет одну обмотку с центральным отводом на фазу. Каждая секция обмотки включается для каждого направления магнитного поля. Так как в этом устройстве магнитный полюс может быть обращен без переключения направления тока, схема коммутации может быть сделана очень простой (например, один транзистор) для каждой обмотки. Как правило, учитывая фазу, центральный отвод каждой обмотки делается общим: давая три вывода на фазу и шесть выводов для типичного двухфазного двигателя. Часто, эти двухфазные общие внутренне соединены, поэтому мотор имеет только 5 руководств.
Микроконтроллер или контроллер шагового двигателя можно использовать для активации транзисторов привода в правильном порядке, и эта простота в эксплуатации делает униполярные двигатели популярными у любителей; они, вероятно, самый дешевый способ получить точные угловые движения.
Микроконтроллер или контроллер шагового двигателя может быть использован для активации транзисторов привода в правильном порядке, и эта простота в эксплуатации делает униполярные двигатели популярными среди любителей; они, вероятно, самый дешевый способ получить точные угловые движения.
Катушки униполярного шагового двигателя
(Для экспериментатора, обмоток могут быть определены путем прикосновения соединительных проводов вместе в личку двигателей. Если клеммы катушки подключены, вал становится труднее поворачивать. один из способов отличить центральный кран (общий провод) от провода катушки-это измерение сопротивления. Сопротивление между общим проводом и проводом конца катушки всегда половина чего оно между проводами конца катушки и конца катушки. Это потому что дважды длина катушки между концами и только половина от центра (общего провода) к концу.) Быстрый способ определить, работает ли шаговый двигатель, — это короткое замыкание каждые две пары и попытаться повернуть вал, всякий раз, когда чувствуется более высокое, чем нормальное сопротивление, это указывает на то, что цепь к конкретной обмотке замкнута и что фаза работает.
Биполярный двигатель
Биполярные двигатели имеют одну обмотку на фазу. Ток в обмотке должен быть отменен для того, чтобы переломить магнитный полюс, поэтому схема должна быть сложнее, как правило, с расположением H-моста (однако есть несколько готовых чипов драйвера, доступных, чтобы сделать это простым делом). Есть два вывода на фазу, ни один из них не является общим.
Эффекты статического трения с использованием H-моста наблюдались при определенных топологиях привода.[2]
Колебание шагового сигнала на более высокой частоте, чем двигатель может реагировать, уменьшит этот эффект статического трения.
Поскольку обмотки лучше использовать, они мощнее, чем униполярный двигатель того же веса. Это связано с физическим пространством, занимаемым обмотками. Униполярный мотор имеет дважды количество провода в таком же космосе, но только половина используемая в любой момент времени, следовательно 50% эффективное (или приблизительно 70% из выхода вращающего момента доступного). Хотя биполярный шаговый двигатель сложнее в управлении, обилие чипов драйвера означает, что это гораздо менее сложно достичь.
Степпер 8 руководств обмотан как униполярный степпер, но провода не соединены с общим внутренним двигателем. Этот вид мотора можно связать проволокой в нескольких конфигураций:
2: двухполярный с замотками серии. Это дает более высокую индуктивность, но меньший ток на обмотку.
3:биполярный с параллельными обмотками. Это требует более высокого тока, но может работать лучше, поскольку индуктивность обмотки уменьшается.
4:двухполярный с одной обмоткой на фазу. Этот метод будет работать двигатель только на половине доступных обмоток, что уменьшит доступный низкоскоростной вращающий момент но требует меньше течения
Шаговые двигатели c большим числом фаз
Многофазные шаговые двигатели со многими фазами имеют тенденцию иметь намного более низкие уровни вибрации,хотя стоимость изготовления выше. Эти двигатели, как правило, называют «гибридными» и имеют более дорогие обработанные детали, но и более качественные подшипники. Хотя они дороже, они имеют более высокую плотность мощности и с соотвествующей электроникой привода фактически более лучше одеты к применению[нужная цитата]. Компьютерные принтеры могут использовать гибридные конструкции.
Схемы привода шагового двигателя
Производительность шагового двигателя зависит от схемы драйвера. Кривые крутящего момента могут быть расширены до больших скоростей, если полюса статора могут быть обращены быстрее, ограничивающим фактором является индуктивность обмотки. Преодолеть индуктивность и быстро переключить обмотки, необходимо увеличить напряжение привода. Это приводит далее к необходимости ограничения тока, который эти высокие напряжения могут вызвать в противном случае.
Микрошаговый
То, что обычно называют микрошагом, часто является синусно-косинусным микрошагом, в котором ток обмотки приближается к синусоидальной форме волны переменного тока. Синусно-косинусный микрошаг является наиболее распространенной формой, но могут использоваться и другие формы волны.[4] независимо от используемой формы волны, по мере того как microsteps будут более малыми, деятельность мотора будет более ровной, тем самым значительно уменьшая резонанс в любых частях, к которым может быть подключен двигатель, а также сам двигатель. Разрешение будет ограничено механически sticktion, отрицательной реакцией, и другими источниками ошибки между мотором и прибором конца. Редукторы шестерни могут быть использованы для увеличения разрешения располагать.
Повторимость размера шага важная характеристика мотора шага и основная причина для их пользы в располагать.
Пример: многие современные гибридные шаговые двигатели рассчитаны таким образом, что перемещение каждого полного шага (например, 1,8 градуса на полный шаг или 200 полных шагов за оборот) будет в пределах 3% или 5% от перемещения каждого другого полного шага, если двигатель работает в заданных рабочих диапазонах. Несколько изготовлений показывают что их моторы могут легко поддерживать равность 3% или 5% размера перемещения шага по мере того как размер шага уменьшен от вполне шагать вниз к шагать 1/10. Затем, по мере роста числа делителей микрошагов повторяемость размера шага ухудшается. При больших уменьшениях размера шага можно выдавать много команд микрошага, прежде чем какое-либо движение вообще произойдет, и тогда движение может быть прыжком в новое положение.
Применение: принтер, маршрутизатор КНК, медицинский инструмент, свет этапа,тексиле, промышленные автоматические оборудования.
Шаговый двигатель
 | Автор предупреждает! Статья не дописана! Данная статья не дописана и требует до- или, даже, переработки. Примеры и данные в этой статье могут быть не проверены, тесты не отлажены, а информация не действительна. Я постараюсь, чтобы таких статей было по-меньше, но пока они есть. Смотрите: NikiWiki:Отказ от ответственности |
Шаговый электродвигатель относится к категории двигателей и общие принципы можно прочесть на соответствующей странице проекта wikipedia:ru:Шаговый_электродвигатель
Существует стандарт на типоразмер двигателей, разработанный National Electrical Manufacturers Association (NEMA) например, один из самых распространённых стандартов NEMA17 означает что размер фланца двигателя имеет габариты 1.7″ (43,18мм) на 1.7″(43,18) при этом длина двигателей варьируется в зависимости от развиваемой ими мощности. Так, например, двигатели NEMA17 очень часто применяются в 3D принтерах поскольку обладают вполне достаточными свойствами и небольшой потребляемой мощностью для подобного рода устройств.
Физические размеры двигателей
В нижеприведённой таблице содержатся основные размеры шаговых двигателей в соответствии со стандартом NEMA
Размеры в таблице указаны в дюймах ( в скобках указаны размеры в миллиметрах)
Маркировка согласно стандарта NEMA
Полностью NEMA стандарт так же описывает иные параметры шаговых двигателей и предусматривает следующую маркировку: NEMA DDMMLLL-CCCIVVVSSSW, где:
Так например: шаговый двигатель с диаметром 3.4″ с фланцем длиной 1.6 дюйма, током обмоток 1.2А, классом B степени нагрева, 5.3V напряжением обмотки, 200 шагами на оборот и подключением восемью проводами будет маркироваться как : NEMA 34D016-012B053200F. Хотя лично я таких маркировок не встречал.
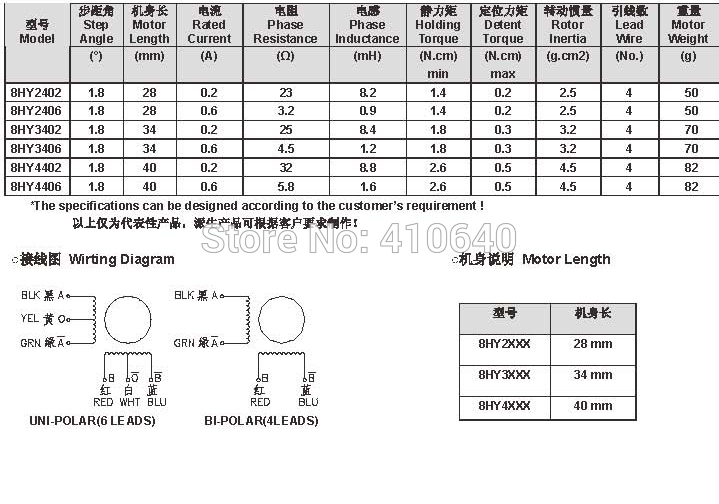
Цветовая маркировка проводов-выводов обмоток
Цвета проводов шаговых двигателей достаточно вольно стандартизованы.
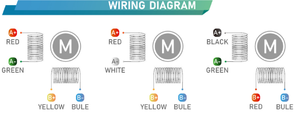
Однако производители «вывешивают» на своих сайтах подобные изображения с целью указания того, какие именно цвета проводов используются в каких случаях. Данная картинка не является полным и законченным пособием ибо требует проверки и в каждом конкретном случае лучше свериться с каталогом производителя.
20мм размер кадра NEMA 8 мини-шагового двигателя

Описание Продукции
- Номер Моделя: 20HS30-0604A
- Скорость : Переменная скорость
- Количество статора : Двухфазный
- Режим возбуждения : HB-Гибрид
- функция : Вождение
- Количество поляков : 2
- Тип : Магнитоэлектрический
- Trademark: JSS
- Packing: 20PCS/Carton, 40PCS/Carton, 60PCS/Carton
- Standard: CE
- Origin: Jiangsu
- HS Code: 850110
- Production Capacity: 20000PCS/Month
NEMA8 1,8° 2 этапа гибридный шаговый двигатель
Общие технические характеристики:
| Угол шага | 1,8° |
| Повышение температуры | 80ºC Max |
| Температура окружающей среды | -20ºC Max∼+50ºC |
| Сопротивление изоляции | 100M ΩMin.,500 В пост. тока |
| Диэлектрической прочности | 500 В переменного тока на 1 минуту |
| Радиальный зазор вала | 0.02Max (450g-нагрузки) |
| Осевой люфт вала | 0,08 Max (450g-нагрузки) |
| Max. Радиальные силы | 20N (20мм от фланца) |
| Max. Asial сил | 2N |
Электрические спецификации:
| Модель № | Угол шага (°) | Напряжение /этапа (V) | Текущий /этапа (A) | Сопротивление /этапа (Ом) | Индуктивности этапа (mH) | Проведение крутящий момент (g.см) | Катушки ротора (g.см²) | Двигатель длина (мм) | Провода отведений № | Вес двигателя (g) |
| 20HS28-0204 | 1.8 | 4.6 | 0,2 | 23 | 8.2 | 140 | 2.5 | 28 | 4 | 50 |
| 20HS30-0506 | 1.8 | 5,75 | 0,5 | 11.5 | 1.7 | 180 | 2.8 | 30 | 6 | 60 |
| 20HS33-0604 | 1.8 | 3.9 | 0,6 | 4.5 | 1.6 | 180 | 3.2 | 33 | 4 | 70 |
| 20HS38-0604 | 1.8 | 6 | 0,6 | 10 | 5.5 | 260 | 3.6 | 38 | 4 | 80 |
| 20HS42-0804 | 1.8 | 1.2 | 0,8 | 1.5 | 5.4 | 300 | 4 | 42 | 4 | 90 |
Наши основные продукты
1. Гибридный шаговый двигатель
(От размера nema 8, nema 11, nema 14, 16, nema nema 17, nema 23, 24, nema nema 34, 42, nema nema 52)
( Переменной замкнутый контур шаговый двигатель, редуктор шаговый двигатель, линейный разъем шагового двигателя и шаговый двигатель тормоза)
2. Шаговый драйверы, плата контроллера и блока питания
3. Электродвигатель вакуумного усилителя тормозов и водителя
4. Электродвигатель привода шпинделя и других аксессуаров
5. Бесщеточный электродвигатель постоянного тока
6. Мы также можем помочь вам приобрести другие детали необходимо
Применение:
Наши шаговый двигатель широко используются в гравировка машины, режущий плоттер, текстильные машины, 3D-принтер, медицинских устройств и освещения сцены оборудования, робота и машины с ЧПУ, музыкальный фонтан, видеонаблюдения и другого промышленного оборудования.
Наша компания:
Мехатроника Jinsanshi Чаньчжоу Co.,Ltd, расположенной в городе Чаньчжоу Jisangsu, Китай, является всеобъемлющим компании, специализирующиеся в области шаговых двигателей, драйверы, шпиндель моторов, двигатели и моторы BLDC вакуумного усилителя тормозов на протяжении нескольких лет.
В настоящее время мы располагаем отличной группы с богатым опытом в производстве и исследование. И у нас есть variouty спецификаций гибридных шаговых двигателей и различные линейный шаговый двигатель, шаговый двигатель, шаговый двигатель с тормоза. В силу своего продолжительный срок службы, стабильную производительность и низкая частота сбоев, наши продукты, а также полученных от клиентов. Мы получили сертификат CE, RoHS и ISO9001:2008.
Если вы заинтересованы в любой из наших продуктов, пожалуйста, посетите наш сайт и непосредственно свяжитесь с нами для получения более подробной информации. Мы рассчитываем сотрудничать с вами!
Часто задаваемые вопросы
1.Q:Могу ли я получить образцы в первую очередь?
A:Убедитесь в том, мы имеем честь предложить вам образцы для проверки.
2.Q:У вас есть на складе?
A:наша продукция производится в соответствии с вашим заказом, за исключением нормальных продуктов.
3.Q:какой срок поставки?
A:Это обычно занимает около 7 рабочих дней,но точный срок поставки может быть различным для разных порядка или в разное время.
4.Q: Как ваша на заводе сделать в отношении контроля качества?
A: Качество является приоритетной задачей. Мы придаем большое значение для контроля качества от начала до конца. Каждый продукт будет полностью собран и протестирован перед отправкой.
5.Q:какой у вас условия гарантии?
A: мы предлагаем различные условия гарантии для различных продуктов. Свяжитесь с нами для получения дополнительной информации.