Механическая характеристика
Механическая характеристика
Определение. Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента нагрузки на валу М, т. е. п (М). От ее характера зависит пригодность асинхронного двигателя для привода различных рабочих механизмов. Так, для многих станков требуется, чтобы частота вращения двигателя оставалась неизменной или почти неизменной при изменении нагрузки. Наряду с этим рабочие механизмы, работающие при резко изменяющихся нагрузках, — прессы, краны, ножницы — требуют быстрого изменения частоты вращения двигателя при таких нагрузках.
Поэтому механическая характеристика двигателя играет существенную роль при выборе приводного двигателя.
Вывод уравнения механической характеристики. Зависимость п(М) может быть получена из формулы M(s) (3.23), если учесть, что s = (n1 – n)/n1. График п(М) представлен на рис. 3.18. Все сказанное о характерных точках и участках графика M(s) справедливо и для графика п(М).
Так, на рабочем участке n1 – nном зависимость п(М) линейная.
Действительно, n = n1(1—s). Так как на этом участке

, то, подставляя значение s в формулу n = n1(1—s), получаем:


График этой зависимости представляется прямой линией (рис. 3.19).

Коэффициент b пропорционален тангенсу угла наклона прямой, т. е.
 где km — масштабный коэффициент.
где km — масштабный коэффициент.
Полученная характеристика называется жесткой, так как в пределах от идеального холостого хода до номинальной нагрузки частота вращения ротора падает не более чем на 10%.
21. Механическая характеристика асинхронного двигателя. Формула Клосса.
22. Искусственные механические характеристики асинхронного двигателя при изменении напряжения питания статора.
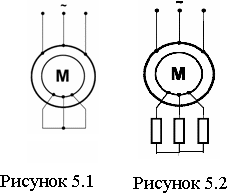
Асинхронный короткозамкнутый электродвигатель (рисунок 5.1) и АД с фазным ротором (рисунок 5.2) широко распространены в электроприводе благодаря большому ресурсу безотказной работы, высоким показателям в работе, хорошим регулировочным свойствам.
На рисунке 5.3 представлена схема замещения одной фазы электродвигателя с учетом параметров намагничивающего контура с активным rm и индуктивным xm сопротивлениями.
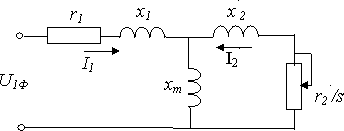

В схеме замещения:
r1 — активное сопротивление фазы статорной обмотки;
r2′ — приведенное к статору активное сопротивление фазы роторной обмотки;
x1 — индуктивное сопротивление фазы статорной обмотки;
x2′ — приведенное к статору индуктивное сопротивление фазы роторной обмотки;
xm — индуктивное сопротивление контура намагничивания.
В соответствии со схемой замещения, роторный ток I2 ’ имеет значение
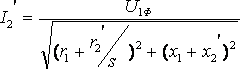
Из (5.1) следует, что роторный ток I2 ’ зависит от скольжения s, т.е. от частоты вращения ротора машины, поскольку

Заметим, что при пуске скольжение s = 1 (текущее значение частоты вращения w = 0), а при частоте вращения w=w идеального холостого хода скольжение равно s = 0. Из соотношения следует также, что при пуске роторный ток достигает максимального значения I2к ’ @ (8¸10)Iном, и его следует ограничивать.
Частота тока ротора fp при значении частоты fc сетевого напряжения fp = fc×s, следовательно, при пуске s=1 и асинхронная машина может быть представлена трансформатором напряжения, поскольку fp=fc =50Гц. По мере разгона двигателя и его работе с номинальным скольжением sн, которое не превышает sн 0,1; падает и частота роторного тока fp = 1..5Гц.
Мощность Р1, потребляемая АД из сети, расходуется на покрытие потерь в контуре намагничивания ∆Рm и в обмотке статора ∆Р1, остаток ее преобразуется в электромагнитную мощность РЭ , которая равна
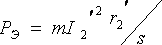
В свою очередь,  , и, решая совместно и находим значение электромагнитного момента
, и, решая совместно и находим значение электромагнитного момента
 .
.
Зависимость (5.4) является описанием механической характеристики АД и представляет сложную зависимость момента АД от скольжения. Исследуем ее на экстремум, взяв производную и приравняв ее нулю:
 .
.
Зависимость имеет максимум при критическом значении скольжения, равном
и критическом (максимальном) моменте
Заметим, знак (+) относится к двигательному режиму, а знак (-) к генераторному режиму машины.
Для практических расчетов, удобнее использовать формулу Клосса, полученную из выражений
 , где
, где  .
.
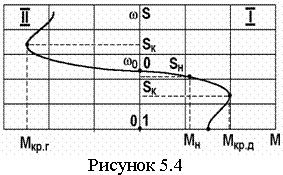
В крупных асинхронных машинах r1 ’ , и ε ≈0. Механическая характеристика АД имеет вид, изображенный на рисунке 2.4. Характерные точки характеристики:
1- s=0; М=0, при этом скорость двигателя равна синхронной;
2- s=sном, М=Мном — номинальный
режим работы двигателя;
3- s = sк, М = Мкр.Д — максимальный момент в двигательном режиме;
4- s = 1, М = Мп — начальный пусковой момент;
5- s = -sк, М = Мкр.Г — максимальный момент в генераторном режиме.
Анализируя влияние напряжения питания U на механические характеристики электродвигателя, имеем на основании соотношений (5.6) и (5.7), что критическое скольжениеsкостается постоянным при понижении напряжения, а критический момент Mкр.д уменьшается пропорционально квадрату питающего напряжения (рисунок 5.5).
При понижении сетевого напряжения до значения 0,9×Uном, т.е. на 10% от Uном, критический момент Mкр.д уменьшается на 19%. При снижении питающего напряжения для развития прежнего значения момента двигатель должен работать с большими роторными токами.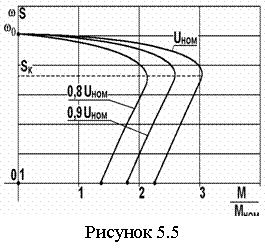
При проектировании электродвигателя следует убедиться, что значение пускового (s = 1) и критического моментов (s = sк) при минимально возможном напряжении удовлетворяют требованиям рабочей машины.
Анализируя влияние активного сопротивления, вводимого в роторную цепь, на основании соотношений (5.5)-(5.6), что с увеличением роторного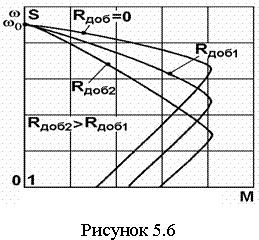
сопротивления, которое становится равным (r2 ’ + Rдоб), увеличивается критическое скольжение Sк, но величина критического момента двигателя Mкр.д остается без изменения.
Механические характеристики приведены на рисунке 12. Метод используется для запуска машины, когда на время пуска в роторную цепь включается значительное по величине Rдоб. Диаграмма запуска аналогична диаграмме запуска двигателя постоянного тока независимого возбуждения. Для расчета искусственных механических характеристик при введении сопротивления Rдоб в роторную цепь используется соотношение
где sи и se – скольжения соответственно на искусственной и естественной характеристиках.
Зная величину Rдоб, вводимого в роторную цепь, для тех же значений момента по соотношению (5.8) производится расчет скольжений sи на искусственной характеристике.
Введение активно – индуктивных сопротивлений в роторную цепь машины (рисунок 14) используется для поддержания большего постоянства пускового момента машины по сравнению с естественной характеристикой машины – механическая характеристика машины в области скольжений 1 3 / 5 3 4 5 > Следующая > >>
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Большая Энциклопедия Нефти и Газа
Механическая характеристика — асинхронный электродвигатель
На рис. 7.10 приведены механические характеристики асинхронных электродвигателей . На рис. 7.10 показана естественная характеристика двигателя с короткозамкнутым ротором. [17]
На рис. 50 показаны механические характеристики асинхронного электродвигателя , построенные по формуле крутящего момента. Этот случай синхронного вращения соответствует идеально — 0, му холостому ходу машины. [18]
На рис. 5.3 даны механические характеристики конденсаторных асинхронных электродвигателей в относительных единицах. Здесь m — момент, отнесенный к пусковому моменту при круговом поле, a v — отношение оборотов к синхронным оборотам при круговом поле. Как видно из рис. 5.3, изменяя коэффициент сигнала, можно получить любые обороты. Ценным качеством этого двигателя является также то, что пусковой момент пропорционален коэффициенту сигнала. [19]
На рис. 10.10 показаны механические характеристики асинхронного электродвигателя трехфазного тока . Эти характеристики имеют как нисходящий, так и восходящий участки кривой. [21]
На рис. 299 показана механическая характеристика асинхронного электродвигателя трехфазного тока . Механическая характеристика уИд Л4д ( со) асинхронного электродвигателя состоит из двух частей: первая — восходящая, неустойчивая — часть Оа расположена левее Мтах; вторая — устойчивая — часть ab — правее. При некотором значении угловой скорости со, соответствующей номинальному моменту М двигателя и номинальной скорости сон двигатель развивает максимальную мощность. Угловую скорость сос, при которой / Ид О, называют синхронной; с этой скоростью ротор вращается при холостом ходе. Точка а диаграммы определяет положение максимального опрокидывающего момента МШх и минимально допустимой угловой скорости comin рабочей части характеристики, а точка О определяет начальный пусковой момент М0 при нулевой угловой скорости ротора. Условия работы электродвигателей при низких скоростях вращения значительно ухудшаются. [22]
На рис. 299 показана механическая характеристика асинхронного электродвигателя трехфазного тока . Механическая характеристика Л1Д — Мд ( со) асинхронного электродвигателя состоит из двух частей: первая — восходящая, неустойчивая — часть Оа расположена левее УЙтах; вторая — устойчивая — часть ab — правее. При некотором значении угловой скорости со, соответствующей номинальному моменту Мн двигателя и номинальной скорости шн двигатель развивает максимальную мощность. Угловую скорость сос, при которой Мд О, называют синхронной; с этой скоростью ротор вращается при холостом ходе. Точка а диаграммы определяет положение максимального опрокидывающего момента МШах и минимально допустимой угловой скорости comin рабочей части характеристики, а точка О определяет начальный пусковой момент М0 при нулевой угловой скорости ротора. Условия работы электродвигателей при низких скоростях вращения значительно ухудшаются. [23]
На рис, 97 с изображена механическая характеристика двух-скоростного асинхронного электродвигателя . Она характеризует частоту вращения ротора в зависимости от величины и характера приложенной к нему нагрузки. На механической характеристике по оси ординат ( вверх) откладываются частота вращения ротора, по очи абсцисс ( вправо и влево от оси ординат) откладываются моменты: справа — реактивные, слева — активные. [25]
Построенная по ( 3 — 13) механическая характеристика асинхронного электродвигателя ( рис. 3 — 4) показывает, что увеличение скольжения машины от нуля до критического ( которое при отсутствии в роторе добавочного сопротивления обычно не превышает 0 15 — 0 2) сопровождается увеличением электромагнитного момента от 0 до УИМ, а дальнейший рост скольжения ведет к его уменьшению. Такой характер зависимости электромагнитного момента машины от скольжения объясняется зависимостью от скольжения не только величины тока ротора, но и его фазы. При увеличении скольжения, как показывает выражение ( 3 — 8), одновременно увеличивается как полный ток ротора, так и отношение его реактивной и активной составляющих, причем три SSK рост этого отношения является определяющим. [27]
В качестве примера на рис. 6.2 приведена механическая характеристика асинхронного электродвигателя , на которой движущий момент УИД и мощность Лгд показаны в виде функции угловой скорости со вала двигателя. [28]
Выражение ( 4 — 19) позволяет проанализировать изменение механической характеристики асинхронного электродвигателя в зависимости от напряжения питания, а также от изменения активных сопротивлений обмоток статора и ротора при колебаниях их температуры. Из уравнения ( 4 — 19) видно, что при постоянной скорости вращения ( sconst) вращающий момент асинхронного двигателя пропорционален второй степени питающею напряжения. На рис. 4 — 4 приведено семейство механических характеристик при колебаниях напряжения на 10 % от номинальной величины. [29]
Механическая характеристика асинхронного электродвигателя зависит от величины сопротивлений в цепи ротора и напряжения, подводимого к статору. Для изменения формы механической характеристики асинхронного электродвигателя могут применяться также схемы несимметричного включения. [30]
Естественные механическая и эл. механическая характеристика АД. Формула Клосса
 Наиболее удобна для анализа работы АД Г-образная схема замещения с намагничивающим контуром, вынесенным на зажимы первичной сети. Здесь
Наиболее удобна для анализа работы АД Г-образная схема замещения с намагничивающим контуром, вынесенным на зажимы первичной сети. Здесь  . Т. к.
. Т. к.  — мало, пренебрегаем им, т.е. получаем
— мало, пренебрегаем им, т.е. получаем  .
.
Приняв для главной цепи поправочный коэффициент s1, получим схему замещения, в которой:  ;
;  ;
;  ;
;  .
.
Используя известные из курса эл. машин выражения для электромагнитного момента:

И критического момента:  .
.
И поделив одно на другое получим после преобразований
Т. к в асинхронных двигателях R1@R`2, то  и
и 
Отсюда уравнение механической характеристики АД, называемое формулой Клосса:
 или при R1=R2’
или при R1=R2’ 
Определив по паспортным данным SKP:
 ,где
,где
 — номинальное скольжение АД,
— номинальное скольжение АД,  — перегрузочная способность АД, можно, задаваясь различными значениями скольжение S, построить естественную механическую характеристику двигателя во всем возможном диапазоне изменения скольжения. На графике приведены естественные характеристики для прямого и обратного действия эл. магнитного момента.
— перегрузочная способность АД, можно, задаваясь различными значениями скольжение S, построить естественную механическую характеристику двигателя во всем возможном диапазоне изменения скольжения. На графике приведены естественные характеристики для прямого и обратного действия эл. магнитного момента.
Если пренебречь активным сопротивлением R1 обмотки статора, то e=0 и упрощенное выражение механической характеристики АД примет вид  .
.
В значительном числе случаев работа АД нормально протекает при S от 0 до (1,2¸1,5)SH, т. е. при S
- Искусственные механические характеристики АД при изменении параметров цепей статора, ротора и питающей сети
- Математическое описание процессов преобразования энергии В асинхронном двигателе
- Рекомендации по выбору бизнеса
- Строительное оборудование МСД
- Тепловые насосы
Теория электропривода
Частотно регулируемый электропривод
Производим и продаем частотные преобразователи: Цены на преобразователи частоты(21.01.16г.): Частотники одна фаза в три: Модель Мощность Цена CFM110 0.25кВт 2300грн CFM110 0.37кВт 2400грн CFM110 0.55кВт 2500грн CFM210 1,0 кВт 3200грн …
Переходные процессы при пуске и торможении электропривода с короткозамкнутым Асинхронным двигателем (АД)
В большинстве случаев к. з. АД питается от сети с U1=const и f1=const. Поэтому нелинейность их механических характеристик проявляется полностью как в режимах пуска, так и торможения. Магнитный поток в …
Переходный процесс электропривода с двигателем независимого возбуждения при изменении магнитного потока
Обычно ДНВ работает при Ф=Фн если U=const или U=var. Необходимость ослабления потока возникает когда требуется получить скорость, превышающую основную (согласно требованиям технологического процесса ). Если бы поток изменялся мгновенно, то …
Продажа шагающий экскаватор 20/90
Цена договорная
Используются в горнодобывающей промышленности при добыче полезных ископаемых (уголь, сланцы, руды черных и
цветных металлов, золото, сырье для химической промышленности, огнеупоров и др.) открытым способом. Их назначение – вскрышные работы с укладкой породы в выработанное пространство или на борт карьера. Экскаваторы способны
перемещать горную массу на большие расстояния. При разработке пород повышенной прочности требуется частичное или
сплошное рыхление взрыванием.
Вместимость ковша, м3 20
Длина стрелы, м 90
Угол наклона стрелы, град 32
Концевая нагрузка (max.) тс 63
Продолжительность рабочего цикла (грунт первой категории), с 60
Высота выгрузки, м 38,5
Глубина копания, м 42,5
Радиус выгрузки, м 83
Просвет под задней частью платформы, м 1,61
Диаметр опорной базы, м 14,5
Удельное давление на грунт при работе и передвижении, МПа 0,105/0,24
Размеры башмака (длина и ширина), м 13 х 2,5
Рабочая масса, т 1690
Мощность механизма подъема, кВт 2х1120
Мощность механизма поворота, кВт 4х250
Мощность механизма тяги, кВт 2х1120
Мощность механизма хода, кВт 2х400
Мощность сетевого двигателя, кВ 2х1600
Напряжение питающей сети, кВ 6
Более детальную информацию можете получить по телефону (063)0416788