
Что такое максимальная частота импульсов
Что такое максимальная частота импульсов?

Многие, смотря на описание ЧПУ контроллера, задаются вопросом о таком параметре, как максимальная частота импульсов. Давайте попробуем разобраться, что это такое и на что это влияет?
Влияет это, конечно, на конечную скорость станка. Разумеется, она зависит не только от электроники, но и от механики. Но в данном случае, мы будем рассматривать систему лишь с точки зрения электроники.
Для примера посчитаем максимальную скорость, которой нам позволит достичь электроника при использовании платы PCIMC-3D и драйверов DM556. У платы PCIMC-3D максимальная частота импульсов 47 kHz.
Для понимания расчетов произведем их под разный шаг ШВП, возьмем шаг 5, 10, 20. В конце это позволит нам определиться с тем, какой именно ШВП нам целесообразно использовать.
Итак, начнем «из далека». Шаговый двигатель имеет свой шаг. У биполярных шаговых двигателей два основных типа HS (к примеру 57HS76-3004) и НМ (к примеру 57HM76-3004). У двигателей HS один шаг это 1,8 градуса, у HM в половину меньше т.е. 0,9 градуса. В сфере ЧПУ станков в 90% используются шаговые двигатели HS, и мы также советуем вам остановиться именно на них. Таким образом, для шагового двигателя HS при одном шаге в 1,8 градуса требуется 200 импульсов на оборот.
Любой драйвер позволяет производить деление шага. Это необходимо для точности позиционирования и плавности перемещения. Деление шага на драйвере DM556, DM542 находятся либо на самом драйвере и называются Pulse/rev Table, либо в руководстве. Деление шага выставляется путем комбинации переключателей на драйвере, согласно таблице.
Пример таблицы на драйвере DM542:
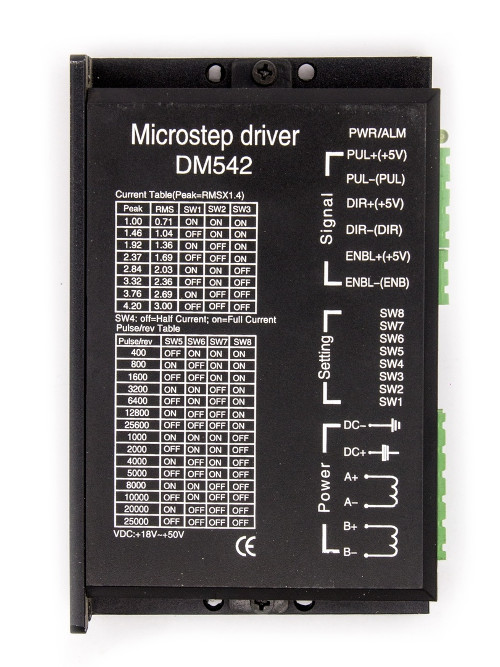
Как таковое деление шага 1/1 (т.е. 200 шагов на оборот двигателя HS) никогда не используют. В данной таблице деление шага указано уже в имп./оборот для удобства. К примеру, 800 имп./оборот в данной таблице это деление шага ¼ (т.е. 200 х 4).
По нашему мнению, самые оптимальные значения деления шага 800, 1600, 3200. Помните, что чем выше деление шага, тем больше плавность перемещения, но тем большая потеря момента (стоит учесть что потеря момента крайне незначительна, но есть). Если вы планируете использовать ваш станок для работ на высоких скоростях (6000 мм/мин и выше), то стоит выбрать меньшее деление шага.
Итак, с шагами двигателя и делением шага на драйвере разобрались, поехали дальше.
В начале статье мы выяснили, что частота у нашей платы PCIMC-3D 47kHz.
47 kHz это частота 47000 импульсов в секунду. Скорость на нашем станке мы хотим узнать в мм/мин, поэтому частоту также переведем в импульсы в минуту, получим: 47000*60 = 2820000 импульсов в минуту.
Исходя из вышесказанного, мы решили, что будем использовать шаговый двигатель HS и на нашем драйвере выставим деление шага 1/8 т.е. 1600 импульсов на оборот.
Теперь узнаем, сколько оборотов в минуту, мы сможем достичь: 2820000/1600 = 1762,5 оборота в минуту.
Ранее мы говорили о том, что будем делать расчет для разных ШВП с шагом: 5, 10, 20.
Поскольку наш шаговый двигатель может достичь максимальных оборотов в 1762,5 об./мин, то при винте с шагом 5 мм/об. максимальная скорость станка будет равна 1762,5 х 5 = 8812,5 мм/мин. Подобным образом сделаем расчет для в винта с шагом 10. 1762,5 x 10 = 17625 мм/мин. И для винта с шагом 20. 1762,5 x 20 = 35250 мм/мин.
Разумеется, это максимальные параметры, и, как я и говорил, реальная максимальная скорость зависит не только от электроники, но и от механики.
Давайте приведем наши расчеты в «божеский вид» и выведем красивую формулу:

Частота контроллера (Hz)— характеристика контроллера ЧПУ, указывается в описании и руководстве к плате. Обратите внимание, что частота в описании указывается в kHz. Для того, чтобы перевести в Hz необходимо умножить на 1000.
Шаг передачи (мм) — расстояние в мм, которое проходит ваш станок за полный оборот шагового двигателя.
Деление шага — дробление шага, выставленное на драйвере шагового двигателя. Обратите внимание, что на некоторых драйвера указывается уже полученное значение деления шага, а не само дробление. К примеру, в таблице на драйвере DM556 значение 1600 есть ни что иное, как 200 х 8.
Вывод: надеюсь, данная статья поможет вам легко определить, стоит ли вам гнаться за платой с высокой частотой, или же вам достаточно бюджетного варианта со сравнительно низкими параметрами.
Надеюсь, данная рубрика будет постоянно пополняться вашими вопросами и нашими ответами на них.
1. Какая максимальная частота импульсов для драйвера шагового двигателя?
Производителями большинства драйверов установлена максимальная частота входных сигналов в 200 kHz. Однако, стоит сделать поправку. При проведении опытов установлено, что в 90% случаев уже на 170 kHz начинают проявляться уходы, пропуски и другие дефекты. Поэтому в случае, если вы планируете работать на высокой частоте, я бы советовал вам установить «порог надежности» в 150 kHz.
Но, как вы успели убедиться в статье, 150 kHz это более чем достаточно!
2. Какая частота у LPT плат?
Для примера возьмем плату LPT-DPTR 1.03. Она, как и большинство подобных плат по своей сути не является генератором импульсов. Она является всего лишь усилителем и элементом защиты. На самом деле импульсы в данном случае формирует компьютер.
Если обратиться к Mach3, то в настройках (Config — Ports&Pins) мы увидим возможность переключения частоты от 25 kHz до 100 kHz. Не стоит «на слово» верить голым цифрам.
Частота зависит на 100% от характеристик вашего компьютера. Делясь накопленным опытом, могу сказать, что большинство рядовых компьютеров могут поддерживать частоту в 45 kHz. Лишь некоторые, более мощные и совершенные, в 60 kHz. Компьютеров, стабильно работающих на частоте свыше 60 kHz, за всю историю встречено не было 🙂
Шаговый двигатель какие обороты

- ШДК
- Статьи
- Схемы
- Arduino
- Управление шаговыми двигателями
- Металлоискатели
- разное
- для Авто
- разное на микроконтроллерах
- всё на таймере NE555
- Конструктор схем
- Осциллографы
- Измерительная аппаратура
- Роботы
- Световые эффекты,управление светом
- Термостат
- Инверторы и преобразователи
- Защиты от перепадов напряжения
- Паяльные станции
- Аудио
- Дозиметры
- Часы
- Выключатели, переключатели,ИК,РФ
- Таймеры
- КУБ светодиодный
- Программаторы
- PIC microchip
- AVR ATmega и ATtiny
- Общее
- Электрические двигатели
- машины постоянного тока
- машины переменного тока
- Генераторы
- генератора независимого возбуждения
- синхронный генератор
- Авто-инжектор
- Элементы ЭСУД, описание
- Законы электротехники
- Основные законы из ТОЭ и др.
- Конкурсные работы 2015
- Конкурсные работы 2014
- Конкурсный работы 2013
- Конкурсные работы 2012
- Схемы
- Скачать
- Программирование
- Электрические расчеты
- Электрические программы
- Справочник
- Книги по релейной защите
- Авто
- Библиотека электромонтера
- Журналы
- Everyday Practical Electronics
- Радио
- Радиоаматор
- Радиолюбитель
- Радиоконструктор
- Схемотехника
- Радио Хобби
- Радиомир
- Ремонт и сервис
- Электрик
- Elektor Electronics
- Разное
- Книги, разные
- Программы,разные
- Ссылки
- Сайты связанные с электричеством
- Авто сайты
- Видео
- Самоделки
- Обучение Arduino
- дуга,разряд,пожар.
- Обучающие видео ролики
- P-CAD Schematic
- РОБОТЫ
- Техническое обслуживание компьютера
- Изготовление печатных плат
- Проекты
- Заказать прошивку
- Регистрация программистов
- С миру по байту
- Информация
- О сайте
- Реклама
- Добавить статью
- Обратная связь
- Обмен банерами
- Электроника из Китая
- В помощь студенту
- Электрические машины
- Эксплуатация релейной защиты

-увеличивающихся по мере прогрева двигателя .
Эти неисправности возникают и при неполадках в цепях управления шаговым мотором и могут быть определены при помощи тестера ДСТ -2 М , который позволяет задавать положение шагового мотора как параметр блока управления .
Выбрав режим управления исполнительными механизмами в тестере , нужно
подвигать шаговый мотор с помощью блока управления в ту или иную сторону . Если при
этом обороты двигателя не изменяются , расход воздуха оста ется постоянным , а система
определяет постоянное положение шагового мотора , неисправность шагового мотора или
цепей ег о управления очевидна .
Проверка шагового мотора с помощью тестера может и не дать результата .
Система будет правильно отрабатывать ваши попытки закрыть или открыть байпасный
канал . Но при этом при эксплуатации автомобиля останутся зависания оборотов при
отключении КПП и заглохания двигателя при движении накатом и невозможность
запуска двигателя без помощи дроссельной заслонки . Появление в комплексе этих
неисправностей говорит о неисправности шагового двигателя или его цепей управления .
И даже при исправных цепях шаговый мотор может просто неправильно выполнять
команды системы управления . Вместо движения вперед отрабатывает движение назад
или наоборот . Это можно наблюдать , если снять шаговый мотор и специальным тестером
задавать ему движения в разные стороны . Алгоритм управления шагового мотора
достаточно сложен , и сбои в его работе могут быть выявлены только специальным
тестером , например , ДСТ -6 Т .
Блок управления может выдавать код неисправности шагового мотора , но не
всегда это означает , что шаговый мотор или цепи его управления действительно вышли
из строя . К сожалению , этот код может появиться и при исправном шаговом моторе .Прежде чем разбираться с шаговым мотором , убедитесь , что заданные обороты
холостого хода в системе выставляются правильно по температуре двига?еля и режим
холостого хода определен в системе (положение дроссельной заслонки 0%).
Совет : Если смазывать механическую часть шагового мотора литолом , то он
работает значительно лучше и дольше . После смазки плохой шаговый мотор часто
восстанавливает свою работоспособность . Непонятно , почему этот вопрос не
продуман на заводе -изготовителе
В системе управления шаговый мотор выполняет несколько основных функций :
Прогрев двигателя после запуска . Система определяет тепловое состояние двигателя
по датчику температуры охлаждающей жидкости и автоматически устанавливает
обороты холостого хода (минимальные обороты при закрытой дроссельной заслонке ).
С помощью шагового мотора в этом случае задается такое сечение байпасного
канала , при котором двигатель способен поддерживать эти обороты .
При открытии дроссельной заслонки весь воздух в двигатель поступает через сечение
дроссельной заслонки , а байпасный канал должен быть подготовлен к резкому
закрытию дросселя и сбросу нагрузки (отключение КПП ). Система отслеживает с
помощью шагового мотора такое сечение байпасного канала (в зависимости от
оборотов двигателя , скорости автомобиля и положение дросселя ), при котором в
случае сброса нагрузки должно быть обеспечено плавное снижение оборотов
коленчатого вала до заданных оборотов холостого хода .
Третьей функцией шагового мотора является компенсация контролируемой блоком
управления нагрузки (включение /выключение вентилятора , кондиционера и т .д .).
Система корректирует положение шагового мотора при включении /выключении
нагрузки в режиме холостого хода для компенсации мощности подключаемой
нагрузки (компенсирует провал оборотов на холостом ходу ).
-неустойчивые обороты двигателя на холостом ходу,
-самопроизвольное повышение или снижение оборотов двигателя,
-остановка работы двигателя при выключении передачи,
-отсутствие повышенных оборотов при запуске холодного двигателя,
-снижение оборотов холостого хода двигателя при включении нагрузки (фары, печка и т.д.).
Подключение шагового двигателя. Контроллер L298
Серия статей: Программирование Arduino с нуля #8
Серия статей: Arduino, использование шаговых двигателей #1
Мы подключили к нашему контроллеру обычные двигетели постоянного тока. С их помощью можно, например двигать мобильную платформу на колесном или гусеничном ходу или совершать простейшие действия (типа открытия двери или поднятия штор). Вот только регулировать вращение этих двигателей можно только подавая на них определенное напряжение. И если мы, например, подадим 100% мощности на одну секунду, мы не можем быть уверены, что за это время двигатель повернет вал, например, на 100 оборотов. Ведь нагрузка может меняться, а соотвтетственно и скорость вращения при той-же заданной мощности. В случае визуального управления роботом это не проблема – увидел, что робот проехал нужную дистанцию – подал команду на остановку. Но мы веть хоти создавать именно автоматические устройства, которые не будут ребовать посоянного внимания. Тут есть несколько вариантов:
Можно применять специальные датчика (энкодеры), которые будут говрить контроллеру сколько именно совершил оборотов совершил вал двигателя. Тогда контроллер сам будет останавливать двигатель после нужного количества оборотов, независимо от меняющейся нагрузки. Так мы сможем быть уверены, что наш робот совершил нужное перемещение. Именно так устроены классические сервоприводы – в них в качестве датчика выступает поворотный потенциометр (именно он ограничивает угол поворота) Вот только у такого способа еть свои недостатки – мы все равно можем управлять только мощностью и временем отключения питания. И управлять оборотами мы можем не очень точно – двигатель то мы отключили, но он ведь может еще некоторое время вращаться по инерции. А для высокоскоростных двигателей за время реакции контроллера вал может совершить несколько лишних оборотов.
Если же нам нужно обеспечить более точное управление двигателем, чтобы он делал точное количество оборотов или даже долей оборота – тогда нам нужно применять шаговые двигатели. С их помощью можно совершать очень точные движения, ведь вращение вала контролируется с точностью до нескольких градусов. Благодаря этому можно использвоать такие двигатели для точныз перемещений – в станках с ЧПУ, 3D принтерах и там, где возможностей сервоприводов недостаточно.
В отличие от сервопривода, в котором используется обычный двигатель постоянного тока, пусть с дополнительным датчиком, шаговый двигатель изначально построен по другой схеме. У него не одна обмотка, а несколько независимых обмоток. Причем обмотки расположены параллельно ротору, но под углом друг к другу. Подача тока на одну из обмоток заставляет ротор поворачиваться на небольщой угол и останвоиться. Если теперь выключить ток на первой обмотке, и подать на следующую – ротор повренется еще на долю оборота. А чередование аодачи напряжения между обмотками заставит ротор вращаться, причем в зависимости от частоты это будет выглядеть или как скачкообразный поворот вала двигателя на определенный угол, или как непрерывное вращение (в случае большой частоты переключения обмоток). Причем здесь мы контроллируем не только мощность но и точную частоту вращения. И можем задать точный угол поворота двигателя и отановить точно на определенном угле поворота.
В отличие от традиционного двигателя постоянного тока, шаговый двигатель обычно имеет от четырех до шести проводов для подключения. Если проводов четыре – перед нами биполярынй двигатель. Два провода подключены к одной обмотке, два – к другой. 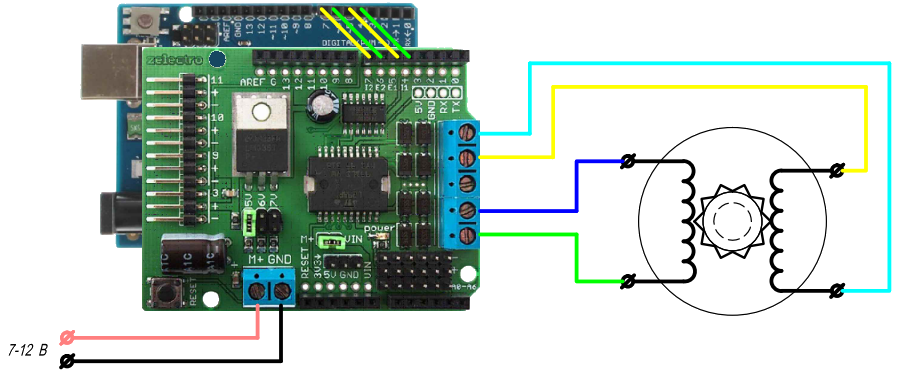
Если же проводов шесть – это униполярыный двигатель. По два провода подключены к концам каждой обмотки и по одному – в ее середине. Эти провода подключается к заземлению. 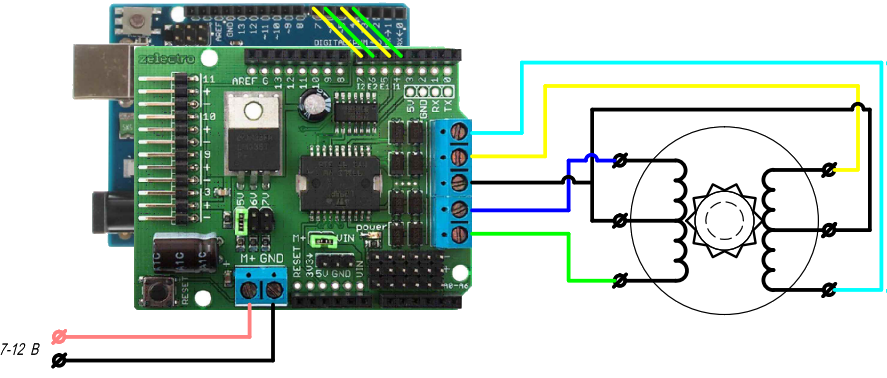
По сравнению с биполярным двигателем, такое подключение обеспечивает большую скорость вращения, но уменьшает крутящий момент. Если нам важен именно момент, то можно просто не подключать эти провода, т.е. мы сделаем из униполярного двигателя биполярный
Таким образом подключение обеих вариантов шаговых двигателей для контроллера ничем не отличаются – и там, и там мы будем управлять двумя выходами для каждой обмотки. Выбрать нужный вариант нужно исключительно исходя из типа имеющегося у нас двигателя и того, что нам более важно – скорость вращения или крутящий момент?
Конечно мы можем вручную написать код, который с определенным интервалом будет чередовать подачу тока на обмотки и таким образом обеспечить управление нашим двигателем. Но этот код давно уже написан и входит в стандартную сборку Arduino IDE, просто подключим библиотеку Stepper командой #include . Теперь создадим объект типа stepper и укажем, к каким именно пинам подключены наши обмотки. Для этого нам нужно указать еще одну характеристику шагового двигателя – количество шагов для одного оборота вала. Стандартыне двигатели, которые проще всего приобрести, обычно имеют точность позиционирования 1,8° или 3.6°. Этот угол соответствует значению одного шага, соответственно для одного оборота нужно будет совершить, соответственно, 200 и 100 шагов. Пусть наш двигетель обладет точностью 200 шагов на оборот:
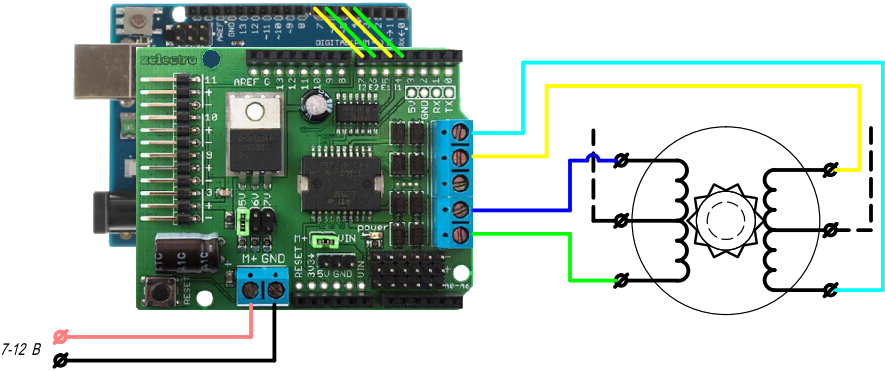
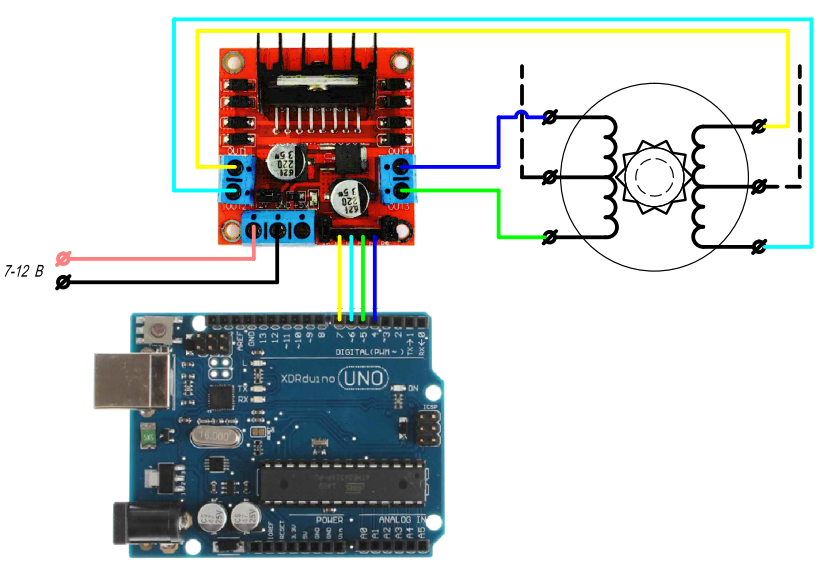
Поскольку при управлении шаговым двигателем используется только наличие или отсутствие тока на обмотках, то нам нет необходимости в подключении выходов с ШИМ регулированием. Достаточно использовать только пины I1 и I2 . Логическая единица на выводе будет соотвтетствовать подаче номинального напряжения на один конец обмотки и нулевого – на другой. Логический ноль — номинальное напряжение на втором конец обмотки и нулевого на первом. Таким образом каждая из двух обмоток управляется одним цифровым выходом.
Также контроллер двигателя может иметь независимое управление каждым выходом (т.е. когда для управления одной парой выводов используется три цифровых выхода – два обычных для независимого управления каждым выходом и один ШИМ для регулирования значения подаваемого напряжения). Здесь мы полностью независимо указываем, какое напряжение (высокое или низкое) подавать на каждый из концов обмотки, т.е каждая из двух обмоток управляется с помощью двух цифровых выводов
Схема подключения такого типа контроллера двигателя:
И в том, и в другом случае на каждую обмотку будет подпапться ток на время, достаточное для совершения валом одного шага. Затем ток с первой обмотки убирается, а подается на вторую (для следующего шага), или ток подается на обе обмотки (для остановки вала в текущем положении) или же тока с обеих обмоток будет снят (для свободного вращения вала) Частота таких переключений будет регулировать скорость вращения. Для изменения частоты служит метод Stepper.setSpeed(int speed); который устанавливает для нашего шагового двигателя определенную скорость вращения (в оборотах в минуту). При этом при вызове этого метода двигатель не начнет вращаться с указанной скоростью – мы только устанавливаем скорость. Для движения необходимо использовать метод Stepper.step(int steps); , который подает команду двигателю сделать steps шагов со скоростью, установленной командой setSpeed . Пример использования для двигателя, подключенного к 4 и 7 пинам:
После загрузки на контрорллер, подключенный к нему двигатель сделает пол оборота со скоростью 60 об/мин (1 об/сек, т.е. на пол оборота ему понадобится 0.5 секунды), остановится на одну секунду, затем с той-же скоростью провернется на пол оборота в обратном направлении.
Нужно уситывать, что мы здесь не можем напрямую влиять на скорость вращения – только на частоту шагов. И если для средних и больших скоростей вращения это не так важно, то при малых значениях скорости будет хорошо заметно прерывистое вращение вала. Например, при установленной скорости 1 оборот в минуту вал двигателя не будет медленно вращаться со скоростью 6 градусов в секунду. Он максимально быстро повернется на 1,8 градуса, затем остановится на треть секунды мс, затем повернется еще на 1,8 градуса, и т.д. Для средних скоростей такое прерывистое значение будет не так заметно, зато хорошо слышны частые щелчки (с частотой переключения обмоток). Поэтому в тех случаях, где нужно медленное и плавное движение, использовать шаговые двигатели напрямую не получится – нужно будет добавлять понижающий редуктор или использовать традиционные двигатели постоянного тока.
21EN-32300 Шаговый мотор (регулятор оборотов)



- Описание
- Отзывы (0)
- Дополнительно
- Доставка и оплата
21EN-32300 Шаговый мотор дроссельной заслонки Hyundai R220LC-9S
OEM-номера: 21EN-32300
Производитель: Южная Корея
Масса: 3 кг
Гарантия: 3 месяца
Применяется на экскаваторах и спецтехнике :
R210LC-9, R210NLC-9, R220LC-9S, R260LC-9S
В наличии широкий ассортимент регуляторов оборотов двигателя (шаговые моторы Throttle motor) для спецтехники Hyundai! Практически весь модельный ряд для экскаваторов и погрузчиков в наличии! Низкие цены! Подберем качественные корейские заменители с аналогичной длиной тросика и крепления.
Редуктора хода с мотором для э кскаваторов Hyundai R210LC-9, R210NLC-9, R220LC-9S, R260LC-9S :
В наличии оригинальные бортовые передачи в сборе с гидромотором хода, а также отдельно редукторы хода без мотора китайского производства. Качественная заводская продукция с гарантией — 6 месяцев. Внутренне по запасным частям идентична оригиналу, что позволит его в будущем ремонтировать, в отличии от универсальных китайских редукторов в сборе с гидромотором.
У нас же Вы можете приобрести любые запасные части для ремонта редуктора хода Doosan, Hyundai, Volvo массой от 18 до 30 тонн. Как оригинальные, так и оем-китайские аналоги валов, саттелит, водил, шестерней, доуконов, подшипников и многого другого по низким ценам!
По Вашему запросу мы готовы предоставить фотографии, размеры редуктора, а случае необходимости — рекомендации от наших клиентов в Вашем регионе!
Широкий ассортимент электрической системы для экскаваторов Hyundai :
— Работаем по договору поставки с НДС.
— Безналичные формы оплаты.
— Отгружаем в день оплаты. Нам не нужно перемещать, ждать и т.д.
— Бесплатно доставим в пределах города, а для клиентов из регионов — довезем до терминала ТК, с которой Вы работаете
— Склады в г. Москва и г. Иваново
Геотранс — запасные части Doosan Hyundai Volvo , а также гидравлические узлы и агрегаты для импортной спецтехники.
Запчасти для ремонта двигателей Cummins, DEUTZ, Volvo Penta (применяемых на спецтехнике Volvo)
Поставки осуществляются как оригинальных, так и OEM -Китайских аналогов.
По Вашему запросу мы готовы предоставить фотографии и размеры запасных частей, а случае необходимости рекомендации от наших клиентов в Вашем регионе!
В наличии широкий ассортимент запасных частей для экскаваторов Hyundai Doosan Caterpillar JCB Hitachi массой от 18 до 40 тонн.
- основной насос
- редуктор хода
- планетарная передача
- шаговый мотор
- валы и шестерни
- пальцы
- втулки
- многое другое
Также у нас Вы можете приобрести детали для ремонта гидравлических насосов: блоки поршней, валы, поршни, ремкомплекты, регуляторы, наклонные шайбы и многое другое.
- Фильтры и элементы от CAT 312 до CAT 345
- Коронки и адаптеры NBLF и COZ
- Гусеничные цепи и направляющие колеса
- Гидроцилиндры на 7 и 9 серии
- Запчасти двигателей CATERPILLAR, PERKINS
- Пальцы, втулки, уплотнения, трапеции и рычаги ковша
Любые запчасти для строительной техники Hyundai Construction от OEM-производителей Южной Кореи и Китая. Работаем грамотно и строго в срок. При отсутствии товара на складе — имеем возможность привезти и растаможить в РФ всего за 5-7 рабочих дней. На всю продукцию предоставляем гарантию от 6 до 24 месяцев.
Можете посетить другие наши сайты
Сайт посвященный редукторам: georeduktor.ru
Сайт посвященный муфтам: g-turbo.ru
Сайт посвященный турбинам и генераторам: turbo-tex.ru
Минимальный объем поставки — 5000 рублей!
Мы работаем как с юридическими,так и с физическими лицами. Оплату принимаем по безналичному расчету (оплата по счету в любом отделении банка).

