G202 драйвер шагового двигателя
G202 драйвер шагового двигателя
Американская компания Geckodrive, основанная в 2000 году, на сегодняшний день является одним из мировых флагманов в области производства драйверов шаговых двигателей. Драйвер шагового двигателя G202, разработанный этой компанией, благодаря таким своим несомненным преимуществам, как компактность, надёжность, высокая эффективность и длительный срок службы, получила широкое распространение в самых различных областях применения шаговых двигателей. Функциональное преимущество данного драйвера, в сравнении с прочими блоками управления ШД, заключается в таких особенностях G202, как:
– полное отсутствие вибрации двигателя при работе на низких оборотах;
– устранения резонанса, возникающего на средних частотах;
– наличие режима автоматического снижения рабочего тока в обмотках во время бездействия двигателя, что позволяет значительно снизить нагрев двигателя и драйвера, а также сократить затраты мощности, потребляемой приводом в статическом состоянии;
– наличие уникальной функции «Морфинг», позволяющей обеспечить гибкое изменение формы тока фазы двигателя в соответствии с частотой его вращения. Использование данной функции даёт возможность плавного и точного переключения между микрошаговым и полношаговым управлением. Это становится возможным благодаря тому, что при увеличении скорости вращения блок управления осуществляет переключение двигателя из режима микрошага в полношаговый режим, переводя синусоидальные формы тока обмоток в прямоугольные. Благодаря применению морфинга момент шагового двигателя на средних и высоких скоростях повышается.
Купить драйвер шагового двигателя G202 в Stepmotor
Использование функции адаптивной регуляции тока, позволяющей снизить нагрев корпуса как при работе, так и в статистическом режиме и, как следствие, избавиться от необходимости принудительного охлаждения, высокая степень надёжности и простота управления, обеспечивающегося стандартной схемой Шаг/Направление (Step/Dir) обеспечили блоку управления шаговым двигателем G202 высокую популярность. Решив купить драйвер шагового двигателя Geckodrive G202 в наличии по доступной цене на нашем сайте, внимательно ознакомьтесь с техническими характеристиками данного устройства, его габаритными размерами и требованиями к эксплуатации. Для сохранения работоспособности устройства используйте драйвер только с совместимым оборудованием. Блок управления G202 рекомендуется использовать в комплекте с шаговыми двигателями FL20, FL28, FL35, FL39, FL42, FL57, FL86 и FL110.
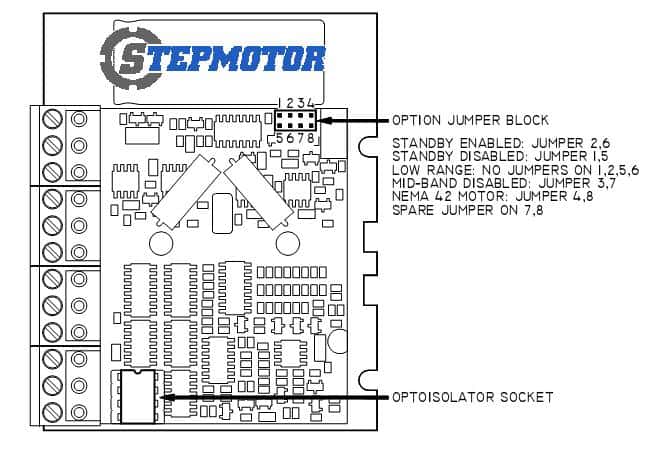
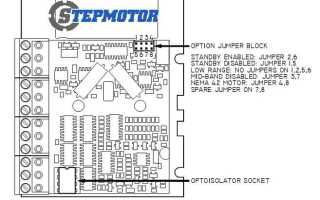
Рис.1. Монтажная схема драйвера G202
Габаритные размеры: 
Технические характеристики драйвера шагового двигателя:
| G202 | |
| Максимальный ток, А | 7 |
| Минимальный ток, А | 0.3 |
| Коэффициенты дробления шага | 1/10 |
| Максимальная частота | 200 кГц |
| Напряжение питания, В | 20-80 |
| Габаритные размеры | 79.4 х 63.5х 21 |
| СКАЧАТЬ ПОЛНОЕ ТЕХНИЧЕСКОЕ ОПИСАНИЕ | 94Кб(pdf) | Acrobat Reader |
| Данные с осцилографа, при подаче короткого замыкания | 92Кб(pdf) | Acrobat Reader |
Рекомендуем использовать с моделями шаговых двигателей:
Купите драйвер шагового двигателя G202 в Stepmotor. Блок управления шаговым двигателем G202 есть в наличии, отгрузка сразу после оплаты. Звоните 8 800 5555 068.
Русские Блоги
Схема разборки шагового двигателя 28BYJ-48, принцип и программа испытаний 51 / stm32
Связанные сведения о 28BYJ-48:
Угол шага шагового двигателя составляет 5,625 градусов (обратите внимание, что это двигатель).
Поскольку это редуктор, конечный угол шага на выходном валу составляет 5,625 / 64 = 0,08789 градуса (поскольку передаточное число равно 1/64).
Для двигателя 64 импульса образуют круг.
Для выходного вала 4096 импульсов представляют собой круг (64 × 64). Двигатель делает 64 оборота, выходной вал — 1 оборот.
Примечание. Базовый угол шага двухфазного двигателя составляет 1,8 °. Для выполнения шага без деления требуется 1 импульс. Для поворота на 360 ° требуется 200 импульсов.
Вопросы и ответы по Baidu:
28BYJ-48 не может достигать скорости 60 / мин. 28byj48, о котором вы упомянули, является наиболее распространенным замедляющим шаговым двигателем (около 10 юаней на сокровище X вместе со схемой привода) .
Мы уже тестировали это раньше, и максимальная скорость составляет около 14 оборотов в минуту. Вы не можете иметь 60 оборотов в минуту. Если биение этой штуки слишком быстрое, она не будет двигаться, и тогда будет небольшой ненормальный шум. На мой взгляд, этот тип двигателя больше всего подходит для обучения. На самом деле я считаю, что он не очень полезен. И скорость, и крутящий момент не идеальны, и, конечно, он достаточно дешевый.
Продолжение
Есть ли такой, который может достигать 30 об / мин? 5в и улн2003 могут водить
продолжение
ULN2003 — это массив Дарлингтона. Этот привод может приводить в действие несколько шаговых двигателей, а их производительность не идеальна из-за ограничения тока.
В электронном магазине X-Treasure они обычно продаются с передаточным числом 64, которые подходят для точного вращения, но скорости недостаточны. Я предлагаю вам подумать о вождении с L298N, а затем купить шаговый двигатель 28 или 35 (без замедления), который немного больше, чтобы было легче достичь 30 или 60 оборотов в минуту, но угол шага намного больше, чем у первого.
1.1 28BYJ-48 в разборке

1.2 Редуктор после открытия верхней крышки


1.3 Ротор

1.4 Обмотка статора

1.5 Обмотка

1.6 Задняя крышка

2. Принцип
Шаговый двигатель — это исполнительный механизм, который преобразует электрические импульсы в угловое смещение. Проще говоря: когда шаговый драйвер получает импульсный сигнал, он приводит в действие шаговый двигатель, чтобы вращать его на фиксированный угол (и угол шага) в заданном направлении. Вы можете контролировать угловое смещение, контролируя количество импульсов, чтобы достичь цели точного позиционирования; в то же время вы можете контролировать скорость и ускорение вращения двигателя, контролируя частоту импульсов, чтобы достичь цели регулирования скорости.
2.1 Основные принципы
Шаговый двигатель 28BYJ48 Тип четырехфазный восьмитактный двигатель, напряжение DC5V—DC12V . Когда на шаговый двигатель подается серия непрерывных управляющих импульсов, он может непрерывно вращаться. Каждый импульсный сигнал соответствует изменению состояния включения фазной или двухфазной обмотки шагового двигателя, что соответствует повороту ротора на определенный угол (угол шага). Когда изменение включенного состояния завершает цикл, ротор вращается на шаг зубьев. Четырехфазные шаговые двигатели могут работать с различными методами подачи питания. Обычные методы подачи питания — однофазные (включение однофазной обмотки) с четырьмя тактами ( A-B-C-D-A . . . ), двойной (двухфазная обмотка запитана) четыре удара ( AB-BC-CD-DA-AB- . . . ), восемь ударов ( A-AB-B-BC-C-CD-D-DA-A 。。。 )
2.2 Схема
1. Параметры двигателя

2. Принципиальная электрическая схема с приводом

2.3 Время истинного значения
Шестнадцатая система (P1 рот)
uchar codeCCW[8]=<0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09>; // Поверните таблицу чередования фаз против часовой стрелки.
uchar code CW[8]=<0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08>; // Таблица чередования фаз вращения часов
3. Прикрепленная программа (нажмите ссылку шрифта)
Незнание шагового двигателя (поворот)
1. Что такое шаговый двигатель?
Шаговый двигатель — это привод, который преобразует электрические импульсы в угловое смещение. Проще говоря: когда шаговый драйвер получает импульсный сигнал, он приводит в действие шаговый двигатель, чтобы вращать его на фиксированный угол (и угол шага) в заданном направлении. Вы можете контролировать угловое смещение, контролируя количество импульсов, чтобы достичь цели точного позиционирования; в то же время вы можете контролировать скорость и ускорение вращения двигателя, контролируя частоту импульсов, чтобы достичь цели регулирования скорости.
2. Какие бывают типы шаговых двигателей?
Шаговые двигатели делятся на три типа: с постоянным магнитом ( PM ), Формула реакции ( VR ) И гибрид ( HB )
Шаговый режим с постоянным магнитом обычно двухфазный, с небольшим крутящим моментом и объемом, а угол шага обычно составляет 7.5 степень или же 15 степень;
Реактивный шаг обычно трехфазный, что позволяет достичь большого выходного крутящего момента, а угол шага обычно составляет 1.5 Степень, но шум и вибрация
Движение большое. В развитых странах, таких как Европа и Америка 80 Возраст исключен;
Гибридный степпинг — это сочетание преимуществ постоянного и реактивного магнита. Он делится на двухфазный и пятифазный: двухфазный шаговый
Угол обычно 1.8 Угол пятифазного шага обычно составляет 0.72 степень. Этот тип шагового двигателя является наиболее широко используемым.
3. Что такое УДЕРЖИВАЮЩИЙ МОМЕНТ?
Удерживающий момент ( HOLDING TORQUE ) Означает, что, когда шаговый двигатель находится под напряжением, но не вращается, статор блокирует вращение.
Момент ребенка. Это один из самых важных параметров шагового двигателя, обычно крутящий момент шагового двигателя на низкой скорости близок к
Сохраняйте крутящий момент. Поскольку выходной крутящий момент шагового двигателя уменьшается с увеличением скорости, выходная мощность также увеличивается с увеличением скорости.
Степень увеличения меняется, поэтому удерживающий момент стал одним из наиболее важных параметров для измерения шагового двигателя. такие как,
Когда люди говорят 2N.m Шаговый двигатель, если не указано иное, означает, что удерживающий момент равен 2N.m Шаг
В мотор.
4. Что такое МОМЕНТ ЗАДЕРЖКИ?
DETENT TORQUE Это относится к крутящему моменту, который статор блокирует ротор, когда шаговый двигатель не находится под напряжением.
DETENT TORQUE В Китае нет единого метода перевода, что может вызвать недопонимание;
Ротор реактивного шагового двигателя не является материалом постоянного магнита, поэтому он не DETENT TORQUE 。
5. Какова точность шагового двигателя? Накапливается?
Как правило, точность шагового двигателя — это угол шага 3-5% , А не кумулятивно.
6. Какая допустимая температура поверхности шагового двигателя?
Высокая температура шагового двигателя сначала размагнитит магнитный материал двигателя, что приведет к падению крутящего момента и даже к потере шага.
Следовательно, максимально допустимая температура поверхности двигателя должна зависеть от точки размагничивания различных магнитных материалов двигателя;
Вообще говоря, точка размагничивания магнитных материалов находится в градусах Цельсия. 130 Выше градуса Цельсия, некоторые даже достигают Цельсия 200 Степень
Таким образом, внешняя температура шагового двигателя находится в градусах Цельсия. 80-90 Степень вполне нормальная.
7. Почему крутящий момент шагового двигателя уменьшается с увеличением скорости?
Когда шаговый двигатель вращается, индуктивность каждой фазной обмотки двигателя образует обратную электродвижущую силу; чем выше частота, тем обратно
Чем больше электродвижущая сила. Под его действием фазный ток двигателя уменьшается с увеличением частоты (или скорости) от
Это приводит к падению крутящего момента.
8. Почему шаговый двигатель может нормально работать на низкой скорости, но не может запуститься, если она превышает определенную скорость, что сопровождается воем?
У шагового двигателя есть технический параметр: пусковая частота без нагрузки, то есть шаговый двигатель может нормально запускаться в условиях холостого хода.
Если частота импульсов выше этого значения, двигатель не может запуститься нормально, и это может вызвать потерю шага или блокировку.
перемена. Под нагрузкой частота запуска должна быть ниже. Если вы хотите, чтобы двигатель вращался с высокой скоростью, частота импульсов
Скорость должна иметь процесс ускорения, то есть начальная частота должна быть низкой, а затем увеличиваться до желаемой высокой частоты (электрическая
Скорость машины повышается с низкой до высокой).
9. Как преодолеть вибрацию и шум двухфазного гибридного шагового двигателя на малых оборотах?
Сильная вибрация и шум при вращении шагового двигателя на малой скорости являются присущими ему недостатками. Как правило, для устранения можно использовать следующие решения:
A. Если шаговый двигатель работает в зоне резонанса, зону резонанса можно избежать, изменив передаточное число и другую механическую передачу;
B. Используйте накопитель с функцией подразделения, которая является наиболее часто используемым и простым методом;
C. Перейдите на шаговый двигатель с меньшим углом шага, например трехфазный или пятифазный шаговый двигатель;
D. Переход на серводвигатель переменного тока может почти полностью преодолеть вибрацию и шум, но стоимость выше;
E. Добавьте магнитный демпфер на вал двигателя. Этот продукт уже есть на рынке, но его механическая конструкция сильно изменилась.
10. Отражает ли номер деления привода деления точность?
Подразделение шагового двигателя по существу представляет собой технологию электронного демпфирования (см. Соответствующую литературу), и его основное назначение
Он предназначен для уменьшения или устранения низкочастотной вибрации шагового двигателя, а для повышения точности работы двигателя — это только одна из технологий подразделения.
С функциями. Например, угол шага равен 1.8° Двухфазный гибридный шаговый двигатель, если привод деления
Количество подразделений установлено на 4 , Тогда рабочее разрешение двигателя для каждого импульса 0.45° , Может ли точность двигателя достичь
К или близко к 0.45° , Это также зависит от других факторов, таких как точность управления током подразделения драйвера подразделения. Разные растения
Точность разбиения дома на подразделения может сильно различаться; чем больше номер подразделения, тем сложнее контролировать точность.
11. В чем разница между последовательным и параллельным подключением четырехфазного гибридного шагового двигателя и драйвера?
Четырехфазный гибридный шаговый двигатель обычно приводится в действие двухфазным драйвером, поэтому при подключении можно использовать метод последовательного подключения.
Или используйте метод параллельного подключения, чтобы подключить четырехфазный двигатель на две фазы. Метод последовательного подключения обычно используется в случаях, когда скорость двигателя относительно высока.
В это время требуемый выходной ток драйвера соответствует фазному току двигателя. 0.7 Раз, поэтому двигатель выделяет меньше тепла; метод параллельного подключения
Обычно используется в случаях с высокой скоростью двигателя (также известной как высокоскоростное соединение), требуемый выходной ток драйвера составляет
Фазный ток двигателя 1.4 Следовательно, двигатель выделяет больше тепла.
12.Как определить источник питания постоянного тока драйвера шагового двигателя?
A. Определение напряжения
Напряжение источника питания драйвера гибридного шагового двигателя обычно находится в широком диапазоне (например, IM483
Напряжение питания равно 12 ~ 48VDC ), напряжение источника питания обычно зависит от рабочей скорости и отклика двигателя.
Пожалуйста, выбери. Если двигатель имеет более высокую рабочую скорость или более быстрое реагирование, тогда значение напряжения также выше, но
Обратите внимание, что пульсации напряжения источника питания не могут превышать максимальное входное напряжение привода, в противном случае привод может быть поврежден.
B. Определение тока
Ток источника питания обычно зависит от тока выходной фазы драйвера. I Чтобы убедиться. Если используется линейный источник питания,
Ток питания обычно желателен I из 1.1 ~ 1.3 Раз; если используется импульсный источник питания, ток источника питания обычно может быть
взять I из 1.5 ~ 2.0 Раз.
13. При каких обстоятельствах используется автономный сигнал БЕСПЛАТНОГО драйвера гибридного шагового двигателя?
Когда офлайн сигнал FREE Когда он низкий, выходной ток от драйвера к двигателю отключается, и ротор двигателя отключается.
По состоянию (автономное состояние). В некоторых средствах автоматизации, если требуется, чтобы привод был включен
Поверните вал двигателя напрямую (ручной режим), вы можете FREE Сигнал установлен на низкий уровень, чтобы двигатель отключился и работал вручную.
Эксплуатация или регулировка. После ручного завершения FREE Установите высокий уровень сигнала, чтобы продолжить автоматическое управление.
14. Как просто отрегулировать направление вращения двухфазного шагового двигателя после включения?
Нужно только подключить двигатель к приводу A+ с участием A- (или же B+ с участием B- ) Просто поменяйте местами 。
Шаговый двигатель 12N.m 34HS5802 5.0А NEMA34
Шаговый двигатель 12N.m 34HS5802 NEMA34
Момент удержания 12N.m (122,3кг.см)
Длина двигателя: 154 мм
Диаметр вала: 14 мм
Количество выходов 4
A+ Красный
A- Зелёный
B+ Желтый
B- Синий

Размеры: 
Диаграмма подключения:

— Шаговый двигатель 34HS5802 (1 шт.)
Интерфейсная плата с полной опторазвязкой порта LPT на 5 осей ЧПУ Написать
Написать
Интерфейсная плата LPT на 5 координат BL-MACH-V1.1 Написать
Написать
ЧПУ контроллер Mach3 USB ST-USB STB4100 на 4 координаты
 Купить
Купить
Генератор импульсов шагового двигателя Купить
Купить
Цифровой драйвер контроллер шагового двигателя 2DM860 ЧПУ CNC 8.4A  Купить
Купить
Цифровой драйвер DM2282 Leadshine  Купить
Купить
Источник питания 48V 7.29А 350W Купить (Для работы двигателя на низких оборотах)
Купить (Для работы двигателя на низких оборотах)
Блок питания на 70V 500W 7,14А Купить (Для работы двигателя на высоких оборотах)
Купить (Для работы двигателя на высоких оборотах)
Смотрите все наши объявления, у нас есть:
| Основные | |
|---|---|
| Потребляемый ток | 5 А |
| Масса | 5.1 кг |
| Количество фаз | 2 |
| Тип двигателя | Бесколлекторный |
| Тип ротора | Фазный |
| Угол шага | 1,8 ° |
| Дополнительные характеристики | |
| Минимальная рабочая температура | -20 град. |
| Максимальная рабочая температура | 80 град. |
| Сопротивление изоляции | 100MΩ, 500VDC |
| Пользовательские характеристики | |
| Тип фланца | NEMA 34 (86 мм) |
| диаметр вала | 14 |
| Крутящий момент (Нм) | 12 |
| Ток (A) | 5 |
- Цена: 2 900 грн.
- Нет в наличии
- Код: 12-019
| День | Время работы | Перерыв |
|---|---|---|
| Понедельник | 09:00 — 18:00 | |
| Вторник | 09:00 — 18:00 | |
| Среда | 09:00 — 18:00 | |
| Четверг | 09:00 — 18:00 | |
| Пятница | 09:00 — 18:00 | |
| Суббота | Выходной | |
| Воскресенье | Выходной |
* Время указано для региона: Украина, Березне
Условия возврата и обмена
Компания осуществляет возврат и обмен этого товара в соответствии с требованиями законодательства.
Сроки возврата
Возврат возможен в течение 14 дней после получения (для товаров надлежащего качества).
Обратная доставка товаров осуществляется по договоренности.
Принципы работы и виды сервоприводов

Сервопривод — это механизм с двигателем, в основе работы которого лежит отрицательная обратная связь, что дает возможность точно управлять движениями, задав нужные параметры. По сути, это любой тип механического привода, в котором есть датчик (положения, скорости, усилия и т.д.) и блок управления, сохраняющий заданные показатели на датчике и всем устройстве в автоматическом режиме.
Главная область применения сервоприводов – это робототехника. Также они устанавливаются в станках с ЧПУ, полиграфическом оборудовании, промышленных швейных линиях и на других производствах.
В данной статье мы подробно расскажем Вам о принципах работы и видах сервоприводов.
Конструкция
Устройство современных сервоприводов достаточно просто и при этом эффективно, так как создает условия для точного регулирования их работы. Конструкция включает:
- привод. Это может быть электродвигатель с редуктором или пневмоцилиндр. Редуктор необходим для уменьшения скорости вращения мотора до тех значений, которые нужны в работе. К выходному валу редуктора прилагается требуемая нагрузка: качалка, вращающийся вал, тянущие или толкающие устройства;
- датчик обратной связи. В качестве него выступает датчик угла поворота выходного вала (энкодер) или потенциометр. Функция – преобразование угла поворота в электрический сигнал;
- блок питания и управления (сервоусилитель, преобразователь частоты, инвертор). Данный элемент принимает и анализирует управляющие импульсы, сравнивает их с показателями датчика, отвечает за пуск и остановку двигателя. В состав блока управления может входить конвертер (датчик управляющего сигнала или воздействия).
Принцип работы
Принцип работы сервоприводов сводится к использованию импульсного сигнала, который изменяется по трем параметрам – частоте повторения, минимальной и максимальной продолжительности. Именно длительность импульса задает угол поворота мотора.
Сигналы, поступающие на сервопривод, имеют стандартную частоту, а их продолжительность может равняться от 0,8 до 2,2 мс (в зависимости от модели). Параллельно с получением управляющего импульса начинается работа генератора опорного импульса, который связан с датчиком обратной связи. Тот, в свою очередь, механически соединен с выходным валом и отвечает за изменение его положения.
Электронный блок анализирует импульсы по длительности и на основе полученных величин определяет разницу между заданным извне положением вала и реальным (измеренным датчиком). С учетом этого происходит корректировка работы путем подачи напряжения на питание двигателя.
Сервоприводы вращательного движения. Чаще всего используются в полиграфических, упаковочных станках, авиамоделировании. Делятся на:
- синхронные – дают возможность точно задавать степень поворота (с точностью до угловых минут), скорость, ускорение. Достигают максимальных оборотов быстрее асинхронных, дороже их в несколько раз;
- асинхронные — позволяют точно выполнять команды скорости даже на малых оборотах.
Сервоприводы линейного движения. Данные устройства могут развивать значительную скорость (до 70 м/с²), что делает их востребованными в автоматах монтажа электронных деталей на печатную плату. Делятся на плоские и круглые модели.
Также сервоприводы классифицируются по принципу действия на электромеханические, где движение обеспечивают мотор и редуктор, и электрогидромеханические, где действует система ил поршня и цилиндра. Вторая группа устройств дает более высокие показатели быстродействия.
Сервопривод или шаговый двигатель?
Сервопривод – это мотор с дополнительным датчиком контроля, обеспечивающим обратную связь. При работе двигатель удерживается в заданном положении, а все отклонения вала фиксируются и исправляются уже на следующем шаге. Шаговый двигатель – это электромотор, функционирующий на основе тандема плата-драйвер и обеспечивающий точность хода только на малых оборотах. Каждый вид оборудования используется в своих целях, и между собой эти виды двигателей не конкурируют.
Сравнительный анализ
Факторы выбора между сервоприводом и шаговым двигателем, их преимущества и недостатки наглядно представлены в таблице.
Сильно падает с повышением скорости. Максимален при остановленном вале
Высокий на всех скоростях. Максимален на высоких оборотах
Инертны, номинальная скорость не превышает 1000 об/мин. При слишком быстром разгоне пропускают шаги, вал может остановиться
Высокое, способны на короткое время увеличить ток обмоток в 3-4 раза от номинального значения. Скорость номинального вращения – до 10000 об/мин и выше
Низкая, не превышает 1 кВт
Высокая, может достигать 15 кВт
Низкая. Очень малый КПД – потребляет много тока, основная часть энергии расходуется в виде тепла
Высокая. Потребляемый ток пропорционален нагрузке
Обратная связь по положению
Отсутствует. Не выполненный шаг будет не замечен в системе ЧПУ. Однако, при грамотном проектировании станка обратная связь не нужна
Есть. Положение вала корректируется во время работы, при сбое обратной связи (например, заклинило вал) система укажет на ошибку
Низкая. Возможна только при применении дополнительных методов управления
Не более 5% от величины шага
Высокая. Если вал заклинило, двигатель просто пропустит шаги
Низкая. При заклинивании вала устройство может провернуть передачу, что приведет к поломке. Может сгореть в случае некорректной настройки поведения драйвера при перегрузке
Просты в настройке, работают по принципу включения и выключения
Множество настраиваемых параметров, что требует предельной внимательности и опыта в использовании
Сильный, что приводит к пропуску шагов, ухудшению качества обработки и др., особенно в крупных станках
Отсутствует, что делает их моторами выбора в крупном оборудовании (рабочее поле более 1,2 м 2 , масса свыше 50 кг)
Сильный, что может потребовать дополнительного охлаждения радиатором и вентилятором
Значительно дешевле сервоприводов, но только до размера фланца 110 мм
Дороже шаговых моторов, но при размере фланца 110 мм и выше цены схожи
Выводы
Сервопривод и шаговый двигатель выбираются под каждую задачу, причем в одном станке или устройстве могут быть использованы одновременно оба вида.
Сервоприводы востребованы в тех механизмах, где необходимо точное позиционирование узлов для их синхронизации с другими деталями. В частности, сервоприводы широко применяются в обрабатывающих станках. Шаговые двигатели прочно заняли свою нишу в станках с ЧПУ (3D-принтеры, гравировальные машины, оборудование для металлообработки и лазерной резки) и в робототехнике.