
Предотвращаем аварии: датчик контроля вибрации мотора с передачей данных на смартфон по BLE
Предотвращаем аварии: датчик контроля вибрации мотора с передачей данных на смартфон по BLE

 Типовая схема датчика мониторинга вибраций мотора, разработанная Texas Instruments, базируется на трехосевом аналоговом акселерометре, малошумящем усилителе, программируемом микроконтроллерном блоке с АЦП и беспроводном контроллере с BLE-интерфейсом. Схема может автономно работать от полугода до 25 лет (в зависимости от режима работы и задействования беспроводной части) и позволяет отслеживать состояние систем кондиционирования, холодильных установок насосов, бытовых и промышленных конструкций и сооружений для ранней профилактики аварийных ситуаций.
Типовая схема датчика мониторинга вибраций мотора, разработанная Texas Instruments, базируется на трехосевом аналоговом акселерометре, малошумящем усилителе, программируемом микроконтроллерном блоке с АЦП и беспроводном контроллере с BLE-интерфейсом. Схема может автономно работать от полугода до 25 лет (в зависимости от режима работы и задействования беспроводной части) и позволяет отслеживать состояние систем кондиционирования, холодильных установок насосов, бытовых и промышленных конструкций и сооружений для ранней профилактики аварийных ситуаций.
Основное предназначение датчиков в системах автоматизации – это индикация текущего состояния объекта управления, своевременное обнаружение и оповещение о внештатных ситуациях.
Развитие и миниатюризация вычислительной техники, а также удешевление датчиков позволяет внедрять предиктивные (предсказательные) методы технического обслуживания. Данные методы предназначены для определения состояния оборудования без вывода из эксплуатации. Их основная задача – предсказать, когда будет нужно провести то или иное техническое обслуживание, чтобы предотвратить приближающийся отказ оборудования.
Помимо аппаратных решений, компания предоставляет и программные ресурсы:
- средства разработки программного обеспечения;
- стеки протоколов;
- примеры приложений.
Структурная схема датчика вибрации
Одним из опорных решений TI является проект TIDA-01575 [1, 2], представляющий собой датчик мониторинга вибраций мотора. В данном решении задействован аналоговый трехосевой акселерометр, малошумящий усилитель, программируемый микроконтроллерный блок с АЦП и беспроводной контроллер с BLE-интерфейсом. Задача представленного решения – анализировать уровень и характер вибраций, возникающих при работе мотора, чтобы определить момент его технического обслуживания, не дожидаясь выхода мотора из строя.
Главные особенности предлагаемого решения:
- отслеживание вибраций МЭМС-акселерометром с тремя осями измерения;
- точность определения вибраций по всех трем осям до 0,01 g;
- Фурье-анализ уровня вибрации (используется быстрое преобразование Фурье, БПФ);
- оптимизация энергопотребления для длительной автономной работы;
- модульное исполнение в виде платы расширения BoosterPack™ с возможностью интеграции с платами серии LaunchPad™;
- возможность легкой адаптации программного обеспечения для работы устройства в сетях Wi-Fi, Sub1GHz SimpleLink, Bluetooth5 или просто для передачи результатов по UART-интерфейсу.
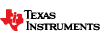
Структурная схема датчика вибраций мотора TIDA-01575 представлена на рисунке 1. В нее входят:
- аналоговая часть (AFE) в виде платы с акселерометром, схемой усиления сигналов на сдвоенном операционном усилителе LMP7702 и ключом управления питанием;
- плата аналого-цифрового преобразователя на базе микроконтроллера MSP432P401R;
- плата LaunchPad с СнК CC2650 для организации беспроводного интерфейса.

Рис. 1. Структурная схема датчика вибраций мотора
Принцип работы
Центральным элементом датчика является микроконтроллер MSP432P401R, выполняющий задачи по приему и обработке сигналов акселерометра, спектральному анализу сигналов, выдаче результатов по UART или передаче их сетевому процессору CC2650.
Сбор первичных данных, обработка измерений и выдача результатов разделены логически в коде приложения и представлены различными программными задачами в рамках операционной системы TI RTOS.
Работой с сигналами акселерометра ведает задача vibration Task. Она запускает АЦП на опрос каналов по прерываниям таймера с частотой 74 кГц и 14-битным разрешением. Благодаря этому каждый из трех каналов акселерометра опрашивается с частотой 24 кГц. По завершении фазы опроса вызывается функция частотного анализа – по полученным данным для каждого канала (каждой оси вибрации).
При работе без сетевого процессора данные контроллером передаются по интерфейсу UART при помощи задачи comms Task. UART настраивается на режим 8-N-1 при скорости 460,8 кбит/с, и при помощи любого программного обеспечения, способного работать с виртуальным COM-портом, возможен прием или визуализация этих данных.
Когда MSP432P401R является хост-контроллером для BLE-процессора, запускается задача AP_create Task, вызывающая функции SimpleLink SDK Bluetooth для установки связи с BLE-процессором на основе СнК CC2650. На рисунке 2 представлено взаимодействие задач опроса акселерометра и передачи обработанных данных по Bluetooth.

Рис. 2. Схема работы приложения в связке «хост-контроллер + сетевой процессор» (BLE-процессор)
При неустановленном соединении (то есть когда нет подключения к конкретному смартфону) устройство рассылает adv-пакеты определенного формата (рисунок 3). В широковещательных данных пакета после небольшого заголовка последовательно идут скомпонованные данные по всем трем осям. В данных для каждой оси указываются параметры преобразования Фурье, номер гармоники с максимальной энергией и значение ее энергии.

Рис. 3. Структура широковещательных данных датчика вибрации
Зная формат adv-пакетов, можно в фоновом режиме отслеживать состояние мотора даже без подключения смартфона к датчику вибраций.
После подключения датчик предоставляет подключенному устройству набор сервисов и характеристик в соответствии со специализированным профилем, и приложение уже может считывать сами спектры вибраций по любой из осей.
Так как датчик может быть расположен в труднодоступном месте (под защитными кожухами или внутри корпуса станка) возможна проблема с его обеспечением стационарным питанием. В связи с этим актуально подключение возможностей режимов пониженного энергопотребления MSP432P401R для продления времени работы без замены батареи. Приложение управляет питанием элементов системы, синхронизируя работы программных компонентов и аппаратной части.
Сам акселерометр и схема обработки его сигналов в процессе измерений потребляют довольно большой ток, поэтому в промежутках между сериями измерений необходимо их отключать.
Управление питанием разделено программой на две части.
В периоды между измерениями, – а это относительно длительные промежутки простоя, – контроллер переходит на уровень LPM3. Длительность данных промежутков определяется функцией pretive_maintenance_setWakeTime (uint8_t Hours, uint8_t Minutes), описанной в файле vibCapture.c. Аргументами функции являются значения длительности интервала, заданные в часах и минутах.
Во время самих измерений, когда требуются промежутки ожидания, например, для стабилизации питания и сигналов в аналоговой части, контроллер переходит в режим потребления LPM0.
Этими мерами минимизируется время нахождения контроллера в активном режиме и, следовательно, дополнительно снижается среднее энергопотребление всего датчика.
Схема профиля энергопотребления приведена на рисунке 4.

Рис. 4. Профиль энергопотребления датчика вибрации
Тестирование приложения
Для тестирования опорного программно-аппаратного проекта был собран небольшой макет (рисунок 5). В его состав входит:
- бесколлекторный мотор постоянного тока, который при тестировании вращается с частотой 3600 об/мин (60 об/с);
- датчик вибраций в сборе с пластиной-резонатором на тестируемом моторе;
- нагрузка мотора в виде другого аналогичного мотора.

Рис. 5. Тестовый макет для опорного решения датчика уровня вибраций
Симуляция неисправности проводилась путем неполного затягивания креплений ведущего мотора, вследствие чего характер его вибраций изменялся.
Взаимодействие с датчиком по BLE производилось при помощи приложения для смартфона SimpleLink SDK Explorer, которое доступно в соответствующих магазинах приложений для платформ Android и IOS.
При неустановленном соединении из adv-пакетов, рассылаемых датчиком, извлекается информация о доминирующих гармониках в спектре колебаний и их энергии (рисунок 6).

Рис. 6. Окно приложения до установки BLE-соединения с датчиком вибраций
После установки соединения приложению доступна детальная информация о спектре колебаний по каждой из осей.
На рисунке 7 представлены спектры вибраций по оси Х для случая нормально закрепленного мотора (отмечен как «Passing motor») и случая, когда крепления мотора были ослаблены («Failing motor»).

Рис. 7. Спектры вибраций по оси Х для случая нормально закрепленного мотора (а) и мотора с ослабленными креплениями (б)
По характеру спектров видно, что в первом случае преобладают вибрации на основной частоте работы мотора (60 Гц), а при ослаблении спектр начинает размываться и появляются дополнительные гармоники, при этом мощность основной гармоники падает. Аналогичные графики доступны и для осей Y и Z.
Диаграмма потребления тока системой во время работы представлена на рисунке 8. Из него видим, что длительность активной фазы работы составляет порядка 65…70 мс, средние токи в активной фазе не превышают нескольких миллиампер (6…9 мА в среднем, с пиками – до 10…12 мА).

Рис. 8. Профиль потребления тока датчиком вибраций на различных этапах работы
Рекомендованным для данного проекта источником автономного питания является батарея типа CR123A с емкостью порядка 1470 мА⋅ч. Неизбежный саморазряд батареи несколько снизит ее емкость: для дальнейших расчетов принято снижение полной емкости на 5%, что даст эффективную емкости батареи 1396 мА⋅ч.
В случае, если хост-контроллер датчика работает автономно (без беспроводного сетевого процессора), основным фактором, влияющим на длительность автономной работы, будет период измерений. В таблице 1 приведены оценки среднего тока потребления и длительности работы датчика вибраций без задействованного BLE-процессора в зависимости от периода измерений.
Таблица 1. Оценки среднего тока потребления и длительности работы датчика вибраций без задействованного BLE-процессора
| Период измерений, ч | Средний ток потребления, мкА | Время автономной работы, часы/годы |
|---|---|---|
| 1 | 31,7 | 44037/5 |
| 2 | 16,5 | 84606/9,65 |
| 4 | 8,8 | 158636/18,1 |
| 6 | 6,2 | 225161/25,7 |
Добавление BLE-процессора в датчик несколько увеличивает энергопотребление. Поскольку события подключения к датчику по BLE пользователем достаточно редки, основной вклад в увеличение среднего тока потребления будет давать рассылка беспроводным контроллером adv-пакетов, а точнее – интервал между их рассылкой.
Увеличение интервала между рассылкой adv-пакетов снижает среднее энергопотребление (таблица 2), но, с другой стороны, несколько затрудняет обнаружение устройства, рассылающего пакеты (по крайней мере, стандартными средствами или при настройках поиска близлежащих устройств «по умолчанию»).
Таблица 2. Средний ток потребления и длительность работы датчика вибраций при подключенном BLE-процессоре в зависимости от интервала рассылки adv-пакетов
| Интервал рассылки, с | Средний ток потребления, мкА | Время автономной работы, часы/годы |
|---|---|---|
| 0,1 | 303,4 | 4601/0,5 |
| 1 | 56,6 | 24665/2,8 |
| 2 | 41,7 | 33506/3,82 |
| 5 | 31,17 | 44789/5,1 |
Дальнейшим усовершенствованием проекта в плане энергопотребления может быть применение внешнего нанотаймера/супервизора для отключения питания на время паузы между замерами. Также можно использовать adv-пакеты для фоновой трансляции результатов измерений – не просто максимальных значений и их частот, а полного спектра. Конечно, такое решение потребует некоторых дополнительных изменений программного обеспечения на смартфоне: режим рассылки adv-пакетов не предусматривает подтверждения их приема и какого-либо протокола обмена данными, рассылка идет в одностороннем порядке.
Заключение
Опорный проект датчика вибраций является прекрасным примером системы с беспроводным BLE-интерфейсом, реализованным на микроконтроллере и беспроводном сетевом процессоре. Отдельного упоминания достойны задействованные в проекте меры по оптимизации энергопотребления как на стороне аналогово-измерительной части, так и на стороне микроконтроллеров.
Напрямую проект может быть применен в таких задачах, как:
- мониторинг систем вентиляции и кондиционирования;
- мониторинг холодильных установок;
- отслеживание состояния насосов;
- датчик вибрации конструкций и сооружений.
Какой двигатель лучше? V-образный, рядный, оппозитный
«Линейка двигателей представлена рядным 4-цилиндровым агрегатом объёмом 2,5 л и 3,5-литровым V6», — гласит рекламный проспект какой-нибудь Toyota Camry. А чем отличаются эти моторы, кроме количества «кубиков» и лошадиных сил? Почему в «Безумном Максе» молились богу V8, и что особенного в «оппозитниках» Subaru? Просто о сложном: разбираем на пальцах особенности автомобильных двигателей.
Компоновка. Продольно или поперечно
Прежде чем говорить о конструкции двигателей, нужно упомянуть о компоновке автомобиля — ведь именно она во многом определяет, какой мотор будет установлен под капотом. Хотя не всегда под капотом: существуют автомобили (в основном спортивные) со средне- и заднемоторной компоновкой, но у большинства гражданских машин двигатель всё-таки находится впереди. О них и поговорим.

Мотор может располагаться в машине продольно или поперечно. Первую схему называют классической, она характерна для автомобилей с задними приводом (или полным, но на основе заднего). Продольная схема почти не накладывает ограничений на размеры силовой установки, как и трансмиссии — коробка передач может быть огромной, с большим запасом прочности, и заканчиваться хоть в центре машины. Такая компоновка характерна для больших автомобилей с мощными двигателями и КПП: грузовиков, внедорожников, премиальных седанов. Хотя раньше так были устроены почти все машины — взять ту же классическую линейку «Жигулей». Но с массовым внедрением переднего привода понадобилась иная, более компактная компоновка.

Для переднего привода необходимо устанавливать двигатель не продольно, а поперечно — вместе с коробкой передач он должен разместиться под капотом между лонжеронами. Ограниченное пространство требует компактности как от трансмиссии, так и от самого мотора, поэтому далеко не все силовые установки подходят для поперечной схемы. Такая компоновка характерна как для переднеприводных машин, так и для полноприводных, система 4WD которых имеет переднеприводные корни — а это почти все современные кроссоверы.
Разобравшись в особенностях компоновок, можно переходить к самим двигателям.

Рядные двигатели
Классический двигатель внутреннего сгорания — рядный, где все цилиндры расположены в один ряд. В литературе такая конструкция обозначается буквой I или R (от английского Row или немецкого Reihe— ряд), а цифра, стоящая рядом, указывает на число цилиндров (R3, R4, R5, R6). Хотя в жизни обозначение «R» встречается редко — автопроизводители не стремятся отдельно выделять «рядность» мотора, считая такую схему обыденной. Вы никогда не встретите шильдик R6 на крышке багажника, в отличие от V6 — хотя рядная «шестёрка» во многом превосходит V-образную. Но об этом ниже.
Рядный 4-цилиндровый двигатель (R4) — самый распространённый в мире, поскольку попадает в наиболее ходовой диапазон рабочего объёма: от 1 до 3 литров. Есть и более объёмные представители: например, тойотовский турбодизель 15B с кубатурой 4,1 л, который ставят на Mega Cruiser, грузовик Dyna и другие модели. Обратный пример — рядный моторчик Subaru EN07 (модели R1, R2, Pleo) объёмом всего 658 «кубиков». Но это всё-таки исключения: оптимальным объёмом одного цилиндра мотористы считают 0,3–0,7 л. Соответственно, большинство 4-цилиндровых двигателей имеют рабочий объём от 1,2 до 2,8 л.
Ещё одна причина популярности рядной «четвёрки» — её относительная компактность. Мотор R4 можно установить почти на любой автомобиль как продольно, так и поперечно. Чего не скажешь о рядной «шестёрке» R6 — дополнительные 2 цилиндра существенно увеличивают длину агрегата. Установить такой двигатель поперечно инженерам удавалось в единичных случаях (Volvo S80 и XC90, Chevrolet Epica) в паре с компактной коробкой передач. В основном моторы R6 устанавливают продольно.
6 цилиндров в ряд (Straight-6) является одной из лучших конструкций двигателя — такая схема полностью сбалансирована и лишена вибраций, отличается плавной работой и эластичностью. Моторы R6 традиционно применяли немецкие производители (BMW, Mercedes-Benz), а также японские: Nissan (серии RB25/RB26, TB45/TB48, дизель TD42), Toyota (серии M, 1G, 1JZ/2JZ, дизели 1HZ/1HD). К сожалению, почти все эти двигатели в настоящий момент вытеснены более универсальными моторами V6.
У рядной «восьмёрки» проблем из-за исполинских размеров ещё больше. Моторы R8 встречались на американских машинах середины прошлого века, советских лимузинах ЗИС-101 и ЗИС-110. Сегодня такие двигатели работают только на судах и тепловозах, а на автомобилях их полностью вытеснили моторы V8.

Рядные двигатели с нечётным числом цилиндров также встречаются (R3, R5). В большинстве случаев они созданы на базе рядной «четвёрки», которой добавили или отняли один цилиндр. Существуют и двухцилиндровые автомобили (Fiat 500, отечественная «Ока»), но в основном моторы R2, как и двигатели с 1 цилиндром, применяются на мотоциклах.
V-образные двигатели
Очевидно, что главная проблема рядного мотора с 6 и более цилиндрами — чрезмерная длина. Как сделать его компактнее? «Распилить», расположив цилиндры в виде латинской буквы V (отсюда и обозначение).

V-образные моторы заметно сложнее рядных: у них две головки блока цилиндров (каждая со своей прокладкой, распредвалами, коллекторами), причудливее схема привода ГРМ. А ещё «вэшки» вибрируют: V8 чуть меньше, V6 и V10 — сильнее. И лишь грозный V12 уравновешен полностью, как и R6 — по сути, он и представляет собой две рядных «шестёрки», соединённых вместе. Но встретить V12 можно только на люксовых машинах и суперкарах.
Основа популярности мотора V6 — его универсальность: он достаточно компактен, поэтому может быть установлен как продольно, так и поперечно. Та же Toyota перестала ставить рядные двигатели серии JZ на свои большие седаны (Mark II, Crown и их производные), перейдя на V-образную серию GR, которую можно встретить на доброй половине модельного ряда: от переднеприводных Camry до внедорожников Land Cruiser Prado. Выпускать универсальные двигатели намного выгоднее, чем специфичные.
Балансировка мотора V6 вызывает определённые сложности у инженеров из-за блуждающих в нём моментов от сил инерции поршней и центробежных сил — чаще всего приходится использовать балансировочные валы, что дополнительно усложняет и без того не самую простую конструкцию двигателя. Угол развала цилиндров у V-образных моторов может быть разным: обычно это 45, 60, 65 или 90 градусов — оптимальные значения с точки зрения вибраций.
Рядно-смещённые двигатели VR и W
Компромиссом между рядной и V-образной схемой стала рядно-смещённая компоновка (VR). Такие моторы активно применяет концерн Volkswagen. VR представляет собой V-образный мотор с экстремально малым углом развала цилиндров (10–20°), что позволяет накрыть их общей головкой блока, как у рядного мотора.
Плюсы такого решения — отказ от второй головки (а значит упрощение и удешевление конструкции) и компактные размеры. Минусы — чудовищные вибрации: чтобы хоть как-то сбалансировать рядно-смещённый мотор, приходится значительно утяжелять коленчатый вал и маховик, применять балансировочные валы, особые подушки двигателя и другие технические решения. Из-за этого схема VR не получила распространения у других автопроизводителей, став фирменной чертой автомобилей VAG.
Volkswagen же активно развивал своё «дитя», придумав W-образный двигатель — V-образный мотор из двух блоков VR на одном коленвале. Такие силовые агрегаты встречаются на флагманах VW, Audi и Bentley.

Оппозитные двигатели («боксёры»)
Оппозитный двигатель иногда называют V-образным с углом развала 180°, но это не совсем верно. В V-образной схеме поршни двигаются синхронно, в то время как в оппозитной — зеркально, словно боксируя друг с другом. Из-за этого оппозитные двигатели называют «боксёрами» (Boxer), обозначая буквой B: B2, B4, B6, B8. Хотя свой 6-цилиндровый «боксёр» EZ30 Subaru называет H6.
Самый популярный оппозитный двигатель стоял на легендарном «Жуке» Volkswagen Old Beetle (Käfer), которых за полвека выпустили 21,5 млн штук. В современных машинах «боксёры» используют только Porsche и Subaru, хотя в мототехнике они широко представлены на моделях BMW и «Уралах».

Плоский горизонтальный «боксёр» — весьма широкий двигатель, что не позволяет записать ему в преимущества компактность. В чём же плюсы такой компоновки? Во-первых, в низком центре тяжести (мотор находится очень близко к земле), что даёт лучшую устойчивость и управляемость автомобиля. Во-вторых, коленвал таких двигателей намного короче, легче и прочнее, по сравнению с рядной схемой. Да и вибрирует оппозитная «четвёрка» меньше, чем рядная, поскольку зеркальное движение поршней взаимно компенсирует их силы инерции. А оппозитная «шестёрка» B6/H6 вообще полностью уравновешена, как и рядная.
Характерные минусы «боксёров»: две головки блока (что для мотора с 4 цилиндрами явно избыточно), затруднённое облуживание и переусложнённая конструкция. А их ключевое преимущество в виде низкого центра тяжести играет роль в автоспорте, но не при повседневной городской езде — обычный водитель вряд ли заметит разницу между «рядником» и «боксёром».
Вибрации и балансировка двигателей
Что водитель чувствует сразу, так это вибрации двигателя — они ухудшают комфорт и могут весьма серьёзно досаждать пассажирам. Помимо этого, вибрации снижают надёжность техники, поэтому инженеры тщательно балансируют моторы. В ход идут противовесы на коленвалах, двухмассовые маховики, продвинутые опоры двигателя, балансировочные валы… Но главное — изначально выбрать удачную конструкцию мотора.
В основном двигатель вибрирует от инерции поршней, совершающих возвратно-поступательные движения. Вспомните, как кивают головой пассажиры при резких разгонах и торможениях — примерно так же ведут себя поршни в конце каждого рабочего такта. В одних двигателях силы инерции и моменты от них взаимно компенсируются, в других остаются свободными, вызывая вибрацию.

Как видно из таблицы, в рядной «четвёрке» остаётся свободной сила инерции второго порядка — не столь неприятная, как первого порядка, но тоже чувствительная. Характерная дрожь мотора в определённых режимах работы — её «заслуга». В оппозитной «четвёрке» эта сила скомпенсирована, но остаётся свободный момент от неё, стремящийся повернуть двигатель вокруг вертикальной оси. Хотя его воздействие почти незаметно для водителя.
У двигателя V6 свободных моментов множество, поэтому в нём приходится применять балансировочные валы. Кстати, трёх- и пятицилиндровые рядные моторы идентичны V6 в уравновешенности, несмотря на нечётное количество цилиндров.
Худшие с точки зрения разгула свободных сил и вибраций — одно- и двухцилиндровые моторы, а также детища Volkswagen: двигатели VR5 и VR6. А лучшие, самые уравновешенные двигатели — рядные и оппозитные «шестёрки». Ну и роскошный V12, конечно.
Какой двигатель лучше
Сравнение двигателей — непростая задача, ведь у каждого автомобилиста свои требования и критерии выбора. Одним важнее надёжность и простота обслуживания, другим нужна максимальная мощность, а третьи смотрят прежде всего на расход топлива. Идеальный мотор должен совмещать все эти преимущества — быть простым и надёжным, мощным и экономичным. Но чаще всего инженерам приходится идти на компромиссы. Хороший пример сложности прямого сравнения моторов — международный конкурс «Двигатель года» (Engine of the Year), лауреаты которого являются произведением инженерного искусства, но не всегда отвечают запросам реальных автомобилистов.
Удачным получится двигатель, или не очень, определяет множество факторов: общая продуманность конструкции и степень форсировки (количество лошадиных сил на рабочий объём), применённые технические решения и экологические рамки. Но при прочих равных можно сделать общие выводы по компоновке мотора. Так, рядная «четвёрка» — базовый и самый простой двигатель большинства автомобилей, который должен быть экономичным и недорогим (конечно, бывают и исключения). Трёхцилиндровый «рядник» — бюджетный вариант для малолитражек, но он не так плох, как многие считают. V6 — агрегат более сложный и дорогой в обслуживании, хотя малофорсированные «вэшки» вполне могут быть «рабочими лошадками». V8 — показатель премиума и единственная возможность разместить сразу 8 цилиндров под капотом современного автомобиля. Рядная «шестёрка» — самая сбалансированная, простая и заслуженно любимая многими компоновка, которая встречается всё реже и реже. «Боксёры» B4 и B6 — специфичные двигатели, которые, безусловно, имеют свои плюсы и армию фанатов. Ну а с автомобильной экзотикой вроде V4, VR5 или VR6 лучше иметь дело, пока она на гарантии…
Причины и способы устранения вибрации электродвигателей
Причины возникновения
Вибрации электрических машин могут возникать на холостом ходу, тогда источник дефекта имеет магнитную природу (неправильный воздушный зазор между статором и ротором, отслоение лака обмоток и так далее) или в момент пуска и под нагрузкой, тогда источник проблемы механический.
К механическим источникам вибрации можно отнести изгиб вала (может быть как следствием, так и причиной), нарушение центровки ротора, перегрев подшипников (например, из-за отсутствия смазки), ослабление резьбовых соединений крепления элементов электродвигателя. Также режим использования электродвигателя (генератор или движитель) может объяснить причину возникновения неисправности, например, поломка лопастей электровентилятора или нарушение соосности муфты при вращении гидроагрегатов.
Вибрационные характеристики
При замере вибрации измеряют её вертикальную и горизонтальную составляющие (или как ещё называют осевая и поперечная). Существует несколько понятий вибрационных характеристик, давайте разберемся какими они бывают и в чем измеряются:
- Виброскорость (измеряется в миллиметрах на секунду, мм/с) – величина, характеризующая перемещение точки измерения вдоль оси электродвигателя.
- Виброускорение (измеряется в метрах на секунду в квадрате, м/с 2 ) – прямая зависимость вибрации от силы её вызвавшей. Виброперемещение (измеряется в микрометрах, мкм) – величина амплитуды, показывающая расстояние между крайними точками при вибрации.
При замерах вибрационных характеристик, как правило, замеряют виброскорость, так как она наиболее точно описывает характер проблемы. При этом измеряют не наибольшее значение виброскорости, а её среднеквадратичное значение (СКЗ). По причине того, что все стрелочные приборы по принципу действия (которые использовались ранее) являются интегрирующими. Допустимые нормы вибрации электродвигателей приведены в Правилах эксплуатации электрических станций и сетей (ПТЭ) и в ГОСТ ИСО 10816.
Так как существует множество разнообразных электрических машин ГОСТ Р 56646-2015 поможет разобраться, какой именно стандарт из группы ГОСТ ИСО 10816 применим к конкретному электродвигателю. Например, для компрессоров, двигателей с насосом и других применений электропривода могут быть различные нормы и требования по проведению замеров.
В этих документах приведены основные требования, нормы, рекомендации, классы вибрационного состояния и прочее.
Приборы для измерения вибрации
Приборы для измерения вибрации делятся на несколько типов: виброметр, виброграф и виброанализатор. Виброметр, простейший прибор, определяет только один параметр (СКЗ виброскорости). Виброграф, пишущий прибор, регистрирующий амплитуду колебаний. Эти два прибора помогут выявить только превышения норм.

Выявить причины (на основании замеряемых параметров) нарушений вибрационных характеристик сможет лишь виброанализатор. Существую одноканальные и многоканальные виброанализаторы, эти приборы позволяют загрузить в них программу измеряемых параметров с компьютера, что после замеров позволит произвести анализ, сделать расчёт и выявить источник вибраций. При использовании виброанализатора, на электродвигатель навешиваются датчики вибрации. Таким образом можно точно установить причину неисправности и меры её устранения.
Алгоритм выявления неисправности
Для определения и устранения причин вибрации электродвигателя существует несложный алгоритм. Осмотреть работающий электродвигатель на предмет отсутствия незакрученных болтов, крышек, надежность крепления двигателя к раме. Далее необходимо рассоединить двигатель и приводимый им в движение механизм. Если вибрация пропала, то причина в соединительной муфте (нарушение центровки полумуфт, разный вес пальцев и так далее).

Если после отсоединения приводного механизма вибрация на холостом ходу присутствует. Значит причина в самом электродвигателе, при отключении питания (когда двигатель на выбеге) должна прекратиться вибрация. Если при отключенном питании она прекратилась, то всему виной воздушный зазор между статором и ротором. При затухающей амплитуде вибраций при отключенном питании, причина в механическом дефекте ротора (изгиб, трещина, дефект роторной бочки) или дефекте полумуфты.
Если при снятой полумуфте вибрация отсутствует, значит – в полумуфте, в противном случае необходимо снимать ротор для динамической балансировки на станке или выявления повреждений обмоток. При диагностике электродвигателя на подшипниках качения их неисправность легко выявить – повышенный шум и сильный нагрев.

Дефект подшипников скольжения будет проявляться под нагрузкой, если выявить причины вибрации под нагрузкой не удаётся, то, скорее всего, виноваты подшипники, необходимо их заменить или отдельно продиагностировать (например, датчики вибрации подключить к месту установки подшипников).

При выявлении повышенного нагрева подшипников необходимо также замерять уровень вибрационных характеристик, потому как сам по себе подшипник редко является источником проблемы, скорее, как следствие.

Важно понимать, что на ответственных механизмах (турбоагрегаты ГЭС, электродвигатели в АЭУ, электроприводы гидростанций и так далее) замер уровня вибрации должен производиться регулярно, в соответствии с графиком технического обслуживания. Замеры должны проводить представители завода-изготовителя или специалисты организации, имеющей лицензию на проведение такого типа работ. Замеры вибрационных характеристик с замером температуры подшипников должны быть отражены в формуляре электрической машины.
Теперь вы знаете, почему возникает вибрация электродвигателя, а также как происходит определение и устранение причин. Надеемся, предоставленная инструкция помогла найти и решить проблему!
Почему вазовские моторы постоянно трясет — экспертный разбор
Для начала разберемся, только ли тольяттинские двигатели неуравновешенн ы или это беда всех моторов.
Любой поршневой двигатель внутреннего сгорания генерирует вибрации в широком частотном диапазоне. Это не газовая турбина и не электродвигатель, где идеально отбалансированный ротор вращается с высокой частотой.
Вибрации можно разделить на три типа.
- Вибрации, от которых нельзя избавиться никакими техническими ухищрениями.
- Вибрации, вызванные неточным изготовлением деталей и узлов. Такие вибрации можно уменьшить, повысив допуски изготовления компонентов.
- Вибрации, вызванные неисправностями мотора.
Особенности ДВС
Любой четырехцилиндровый четырехтактный двигатель не сбалансирован. Казалось бы: два поршня идут вниз, два вверх, все уравновешено. Но остаются нескомпенсированными силы инерции второго порядка, которые пытаются сотрясать весь мотор вверх-вниз с частотой, вдвое превышающей частоту вращения коленвала. Для борьбы с этим явлением придумана схема с двумя балансировочными валами, вращающимися в противоположные стороны вдвое быстрее коленчатого вала. Эти валы своими колебаниями позволяют полностью компенсировать колебания от неуравновешенности шатунно-поршневой группы. Примером может быть ниссановский мотор MR20DE, который встречается на популярных у нас кроссоверах X-Trail и Qashqai.
Почему же вазовские мотористы не используют это решение? Дело в том, что такие системы ставят на двигатели с рабочим объемом от 2 литров. У такого мотора масса поршня с шатуном в сборе оказывается достаточно большой. Если же рабочий объем меньше, то и диаметр поршня и длина шатуна тоже меньше — как и общий вес деталей. Вследствие этого и вибраций меньше. Самый большой серийно выпускающийся в Тольятти двигатель имеет рабочий объем 1,8 л. Поэтому балансировочных валов здесь нет.
Культура производства
Никакой ручной сборки, обкатки, а потом разборки и промеров, как это делают в компании Rolls-Royce, на ВАЗе, конечно, не практикуют. Но и откровенного конвейерного брака, как иногда бывало в 90-е годы прошлого века, уже не увидишь. Однако всегда есть шанс того, что какому-то двигателю достанутся детали с неудачным совпадением допусков.
Дело в том, что разница в весе между двумя одинаковыми поршнями или шатунами из одной партии может достигать нескольких граммов. У большинства иномарок с двигателем рабочего объема 1.6–1.8 л допустимая разница не превышает трех граммов. А реально укладывается в 1–2 г. Хочется верить, что подобных допусков сегодня придерживаются и на ВАЗе. Но даже если и так — представьте, что самому тяжелому из комплекта поршню достанется еще и самый тяжелый шатун. Тогда разница между поршнем и шатуном в сборе одного из цилиндров будет значительно отличаться от массы этих деталей в другом цилиндре. Отсюда и повышенные вибрации.
Поэтому при ремонте с заменой деталей шатунно-поршневой группы хороший моторист постарается убрать разницу в весе ремонтных деталей. Для этого с поршня или шатуна удаляется небольшой слой металла с таким расчетом, чтобы все детали «подтянуть» по весу к самой легкой. Горе-мастер не обратит на это внимания и в результате может увеличить вибрацию собранного мотора.
Впрочем, от самого АВТОВАЗа на этом этапе уже ничего не зависит. А могут ли пересмотреть допуски деталей шатунно-поршневой группы на конвейере? Вполне. И это наверняка даст положительный эффект. Вот только нельзя забывать о том, что культура производства моторов на ВАЗе находится сегодня на среднем уровне и в целом соответствует ценовому диапазону выпускаемых автомобилей. Чем строже допуски, тем дороже в итоге конечный продукт. Готовы ли покупатели вазовских машин платить больше? Едва ли.
Качество комплектующих
Предложений на рынке запасных частей для вазовских моторов пруд пруди, гораздо больше, чем для иномарок. И это понятно: в рейтингах продаж АВТОВАЗ лидирует. Неудивительно и то, что среди прорвы запчастей масса поддельной или недостаточно качественной продукции. А это, в свою очередь, также влияет на вибронагруженность силового агрегата. Повышенные вибрации могут быть спровоцированы дефектами вспомогательных агрегатов, приводимых ремнем, или некондиционным маховиком, а также ведущим и ведомым диском сцепления. А еще в ходе эксплуатации добавить вибраций способен шкив коленчатого вала, особенно если у него начал расслаиваться резиновый демпфер. Очень часто на вазовских моторах вибрацию вызывают неисправные датчики массового расхода воздуха.
Заметно возрастают вибрации, когда есть недостатки в работе одного цилиндра — двигатель «троит». Вот несколько самых распространенных причин.
- Перебои в искрообразовании. Возможные виновники — свеча, катушка, высоковольтный провод.
- Перебои в подаче топлива (неисправна/засорилась форсунка).
- Подсос неучтенного воздуха в один из цилиндров из-за негерметичной прокладки впускного трубопровода.
- Низкая компрессия в одном из цилиндров. Может быть вызвана недостаточным уплотнением поршня в цилиндре, негерметичностью клапанного механизма или прокладки ГБЦ.
Все вибрации силового агрегата призваны компенсировать резинометаллические опоры. С этой задачей они справляются до тех пор, пока сами исправны. А при выходе из строя могут усиливать вибрации.
Вообще, надо отметить, что на форумах любителей Лады многие страницы посвящены вибрации и троению двигателей. Причем специалисты в дилерском центре чаще всего неисправности не усматривают — почти всегда ссылаются на плохой бензин. Доля истины в этом есть. Во-первых, во многих регионах качество топлива ощутимо хуже, чем в столице. Во-вторых, многие не от хорошей жизни заправляются на «левых» АЗС в надежде сэкономить. И такая экономия очень часто «вылезает боком».
В целом же вазовские двигатели по уровню вибраций лишь немного проигрывают аналогичным моторам иномарок в том же ценовом сегменте.
- Шесть самых надежных двигателей (из тех, что еще продаются) мы собрали в этой публикации.

